


Robot Algebra: Authentic Applications of the Pythagorean Theorem
As a former high school and collegiate math teacher, I remember many days in my classroom where I would finally get to teach one of my favorite formulas: the Pythagorean Theorem. I’ve seen this taught in many ways.
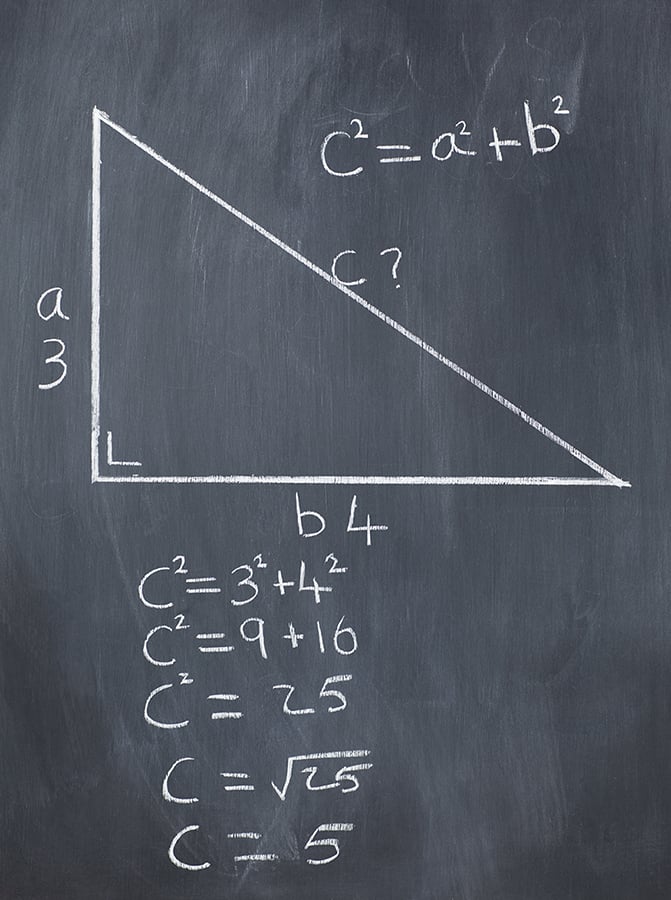
I’ve seen it taught where a formula is given to the students and they practice solving procedural multi-step equations to solve for the missing side length.
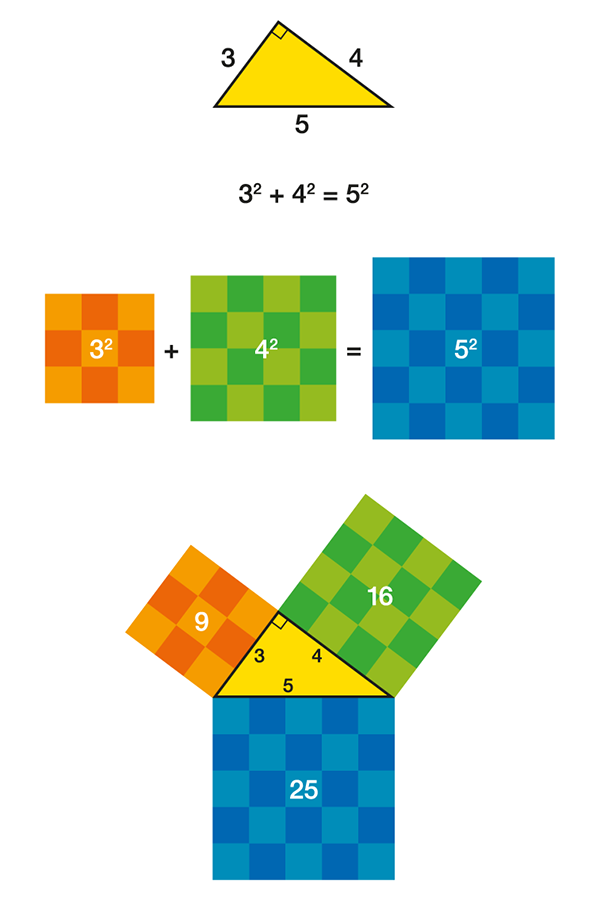
I’ve also seen the Pythagorean Theorem taught graphically, where each of the sides are represented visually, and the square area of sides A and B sum to the square area of side C.
But for myself, to begin teaching this concept, I always wanted to begin with why this was such an important formula to learn and understand.

I would pose the problem as: you are outside in an open field, and your dog or cat ran away and is a short distance from you. What is the absolute shortest, and most efficient way for you to travel in order to get to your pet?
But, is providing a hypothetical scenario that a pet ran away and you need to calculate the shortest distance to retrieve that pet the most authentic and realistic experience? Even as a math person, if my pet ran away I wouldn’t be doing calculations in order to retrieve it. I was looking for a real-world experience where my students would need to calculate these distances in an authentic manner, in order to solve a real problem or task. I didn’t want to just teach these math concepts in a silo, I wanted to teach them in context, for a number of reasons.
One reason is that students are not as motivated to solve problems that do not contain much context. Solving equations for the sake of solving equations is not particularly interesting or engaging, even though obtaining mathematical fluency is important. Students desire meaningful participation. One of the questions that I got almost everyday as a math teacher was, “when am I going to ever use this in real life?” or “what job would use this?”
Just thinking from a pedagogical perspective and transfer of knowledge or skills, learning a particular math concept in isolation, or learning how to plug and chug numbers into a formula does not necessarily mean that a student then knows when to apply that formula or knowledge, or even how to obtain the correct numbers to use in that formula.
It’s one thing to learn certain math concepts, and another to be able to apply those to real-world situations and real-world problems.
For example, I could have students fill out a worksheet over multiple days where they are given triangles and have to solve for the unknown sides. Most of those problems don’t have any context, they are basic right triangles with the sides labeled. These types of problems don’t exist in isolation in everyday life or in the workforce. Oftentimes, a problem in context needs to be analyzed and deconstructed in order to use a particular formula or mathematical concept. These are valuable skills that are used in the current workforce, where students can learn and actually apply mathematical concepts in order to solve problems.
Students can become very proficient in the procedure of solving for an unknown side, but again, when faced with a real-world problem, would they know how to apply that formula in context?
David Weintrop and his associates noted through their research that:
“science and mathematics provide a meaningful context (and set of problems) within which computational thinking can be applied. This differs markedly from teaching computational thinking as part of a standalone course in which the assignments that students are given tend to be divorced from real-world problems and applications. This sense of authenticity and real-world applicability is important in the effort to motivate diverse and meaningful participation in computational and scientific activities."
The answer then became clear – teach mathematical concepts through robotics. Robotics is an amazing way to teach math in an authentic and meaningful way. This situation can be used in a physical robotic sense, or a virtual one. For this particular example, I used VRC Virtual Skills (for more on Virtual Skills, check out the Get Started page).
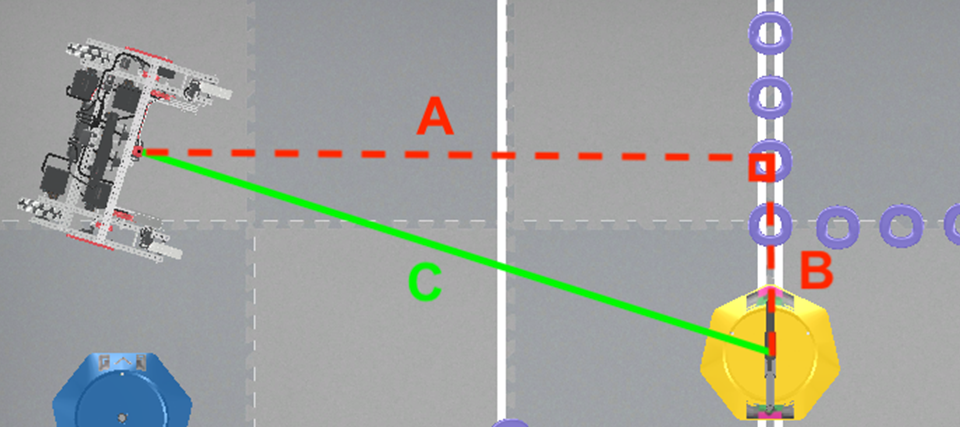
Instead of posing the question as a possible scenario, like retrieving a pet in the most efficient way, we can use a more authentic scenario, like a robot needing to travel and pick up a Mobile Goal in order to score. This is a scenario where students can use mathematical formulas in order to calculate distances instead of guessing and checking, while playing an actual game with a virtual robot.
Instead of posing the question as a possible scenario, like retrieving a pet in the most efficient way, we can use a more authentic scenario, like a robot needing to travel and pick up a Mobile Goal in order to score. This is a scenario where students can use mathematical formulas in order to calculate distances instead of guessing and checking, while playing an actual game with a virtual robot.
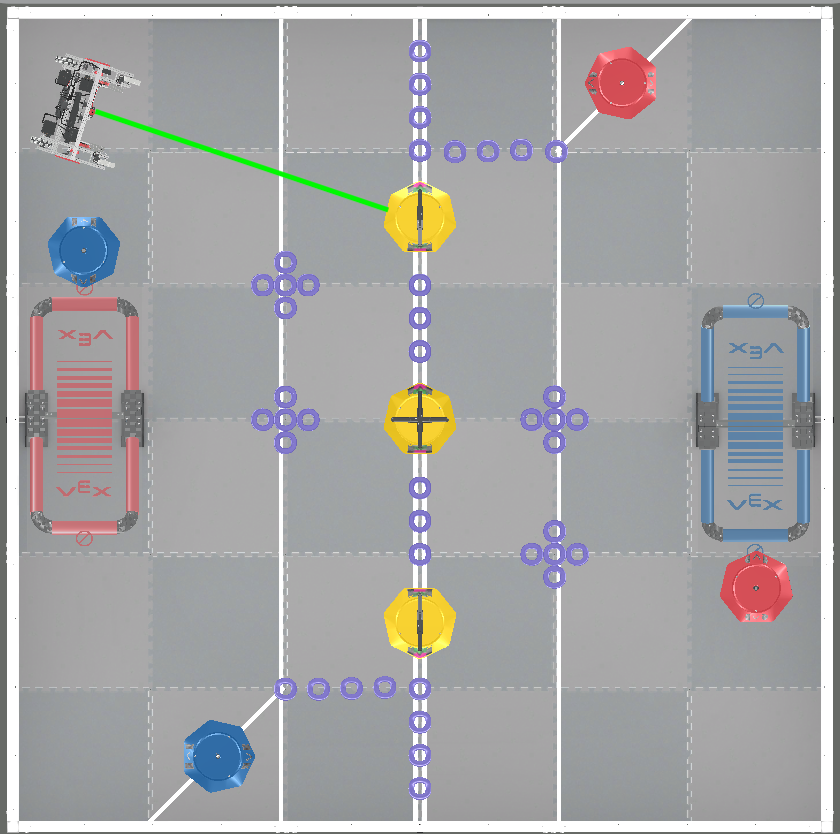
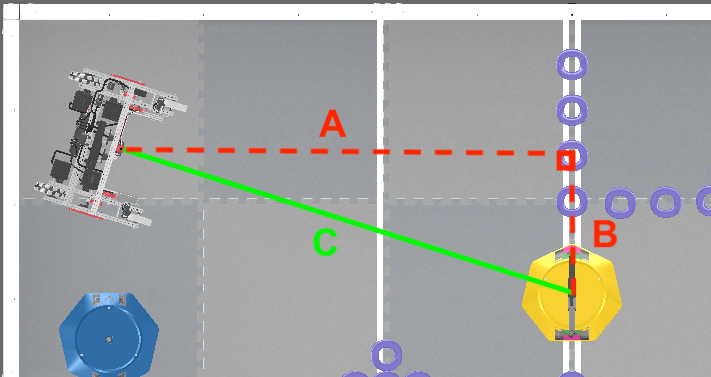
The question then becomes, how do we calculate the distance of this diagonal line? Students can create a right triangle where the hypotenuse is the desired distance to travel. If using a physical VRC Field, they can measure the distances by hand. They can also obtain the approximate distances from the (X, Y) coordinates on the VRC Field. The virtual VRC Field is the same size and scale as the physical equivalent:
- A is approximately 1500mm
- B is approximately 600mm
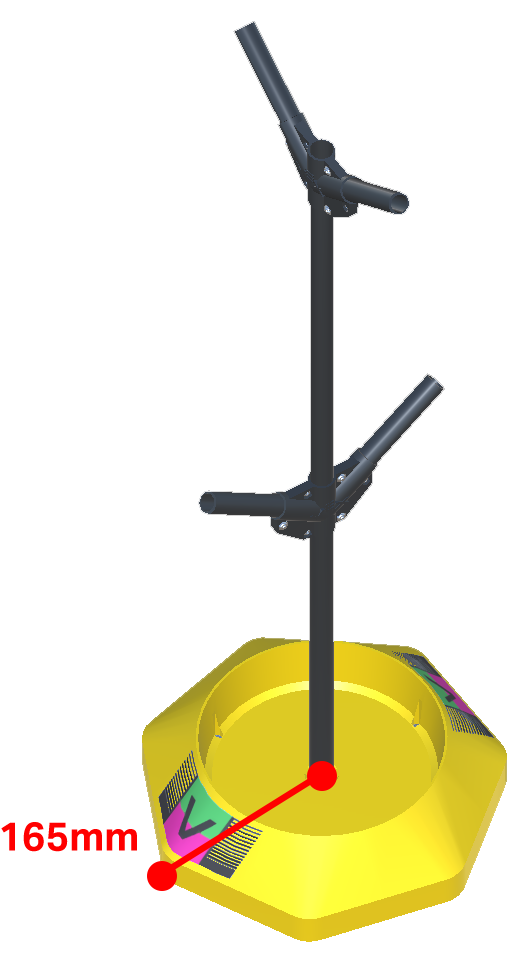
From the image above, you can ask your students: Do we actually want the tip of Moby to drive to the center of the Mobile Goal, or stop once it reaches the edge? Students can actually explore this concept with their code. In doing so, they will realize that coding Moby to drive to the center of the Mobile Goal will actually cause Moby to push it further; since, you’re essentially coding the robot to drive into the center of the goal instead of the edge.
Students can then use the information that the center of the Mobile Goal to the edge is 165mm.
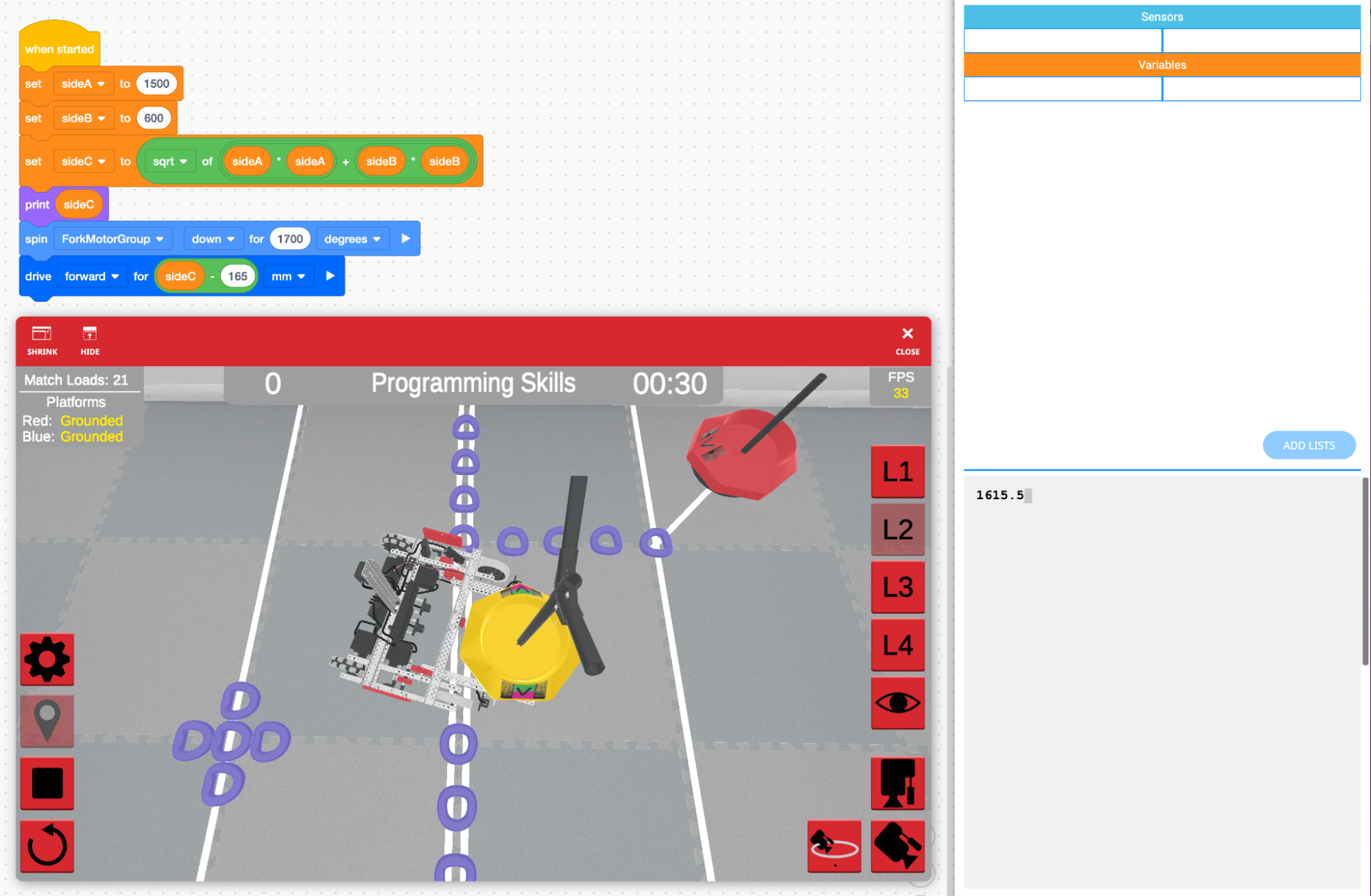
Using Variable and Operator blocks, the Pythagorean Theorem can be coded to calculate side C. The value of side C can also be displayed using the Print Console. This allows students to actually verify the distance and ensure they coded the formula correctly.
Not only is using robotics a fantastic way to expose many of the different math formulas and concepts that can sometimes be very abstract and difficult to understand for students, but it also provides an authentic medium through which students can explore using different mathematical concepts to authentically complete tasks, and solve problems.
For more information about using applied mathematics with VEXcode VR, check out this article from the STEM Library.
What are some ways you make math visible in your classroom using robotics? Share your stories in the Community!
Lauren Harter is a Senior Education Developer at VEX Robotics.
Like this article? Discuss it in the VEX Professional Learning Community.