


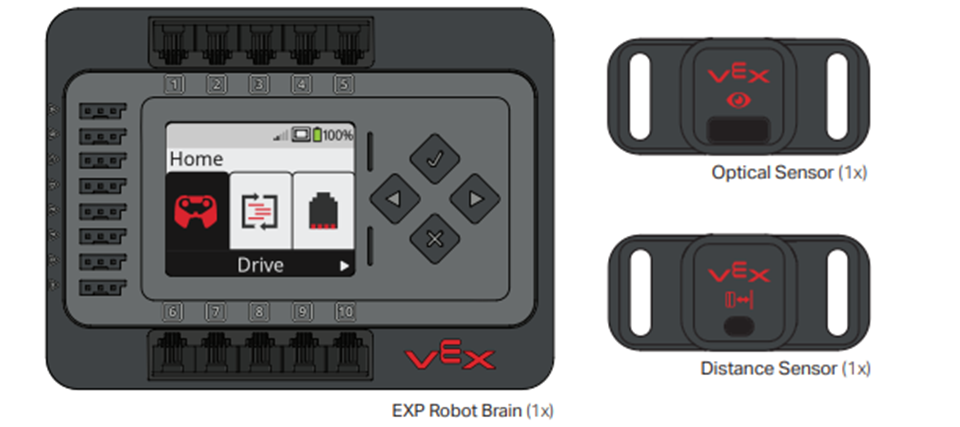
การวิเคราะห์และใช้ข้อมูลเซ็นเซอร์ EXP
ภาพรวม
เซ็นเซอร์ในระบบ EXP ทำตามชื่อของพวกเขาพวกเขารับรู้สิ่งต่างๆ หากไม่มีเซ็นเซอร์เหล่านี้การสร้างของคุณจะมีเพดานสมมติอยู่เหนือศีรษะพร้อมกับสิ่งที่สามารถทำได้ หมายความว่าเราจะต้องใช้ทุกแง่มุมที่เกี่ยวข้องกับหุ่นยนต์ของเราในการพิจารณาอย่างรอบคอบและใส่ลงในรหัส การใช้เซ็นเซอร์สอดคล้องกับคำพูดที่ว่าคิดอย่าง ชาญฉลาดไม่ ยากขึ้น ส่วนที่ยากในการใช้เซ็นเซอร์คือการวิเคราะห์และใช้ข้อมูลที่เกี่ยวข้องซึ่งบทความนี้จะอธิบายอย่างละเอียด
ข้อมูลและตำแหน่ง
เซ็นเซอร์ควรติดตั้งในตำแหน่งที่เหมาะสมที่สุดเมื่อเทียบกับการใช้งาน ตัวอย่างเช่นควรวางสวิตช์กันชนไว้ที่ความสูงที่จะชนกับส่วนอื่นควรวางเซ็นเซอร์ตรวจจับแสงไว้ที่จะพบกับวัตถุแปลกปลอมและวางเซ็นเซอร์ระยะทางไว้ที่มีพื้นที่ด้านหน้าเป็นจำนวนมาก การทำความเข้าใจ ตำแหน่ง ที่จะติดตั้งเซ็นเซอร์เหล่านี้ตามการใช้งานเป็นขั้นตอนแรกในการใช้ข้อมูลเซ็นเซอร์ EXP ลองดูตัวอย่างเหล่านี้ในเชิงลึกมากขึ้น
สวิตช์กันชน
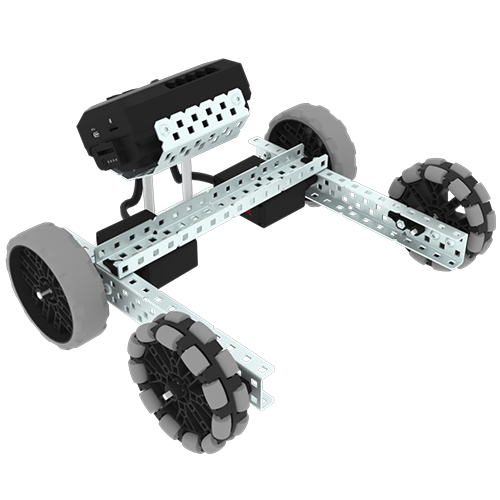
สวิตช์กันชน vex ขึ้นอยู่กับอุปกรณ์ไฟฟ้าที่ใช้บ่อยที่สุด: สวิตช์ สวิทช์ประกอบด้วยสองขั้ว (สถานที่ในการแนบลวด) และสะพานลวดเพื่อ 'ทำ' การเชื่อมต่อเมื่อกดสวิทช์ซึ่งได้รับจากสมองหุ่นยนต์ ตำแหน่งของสวิตช์ขึ้นอยู่กับสถานการณ์การใช้งานทั้งหมด สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับกันชนที่กำหนดว่าหุ่นยนต์ของคุณสัมผัสกับวัตถุอื่นหรือไม่ ตัวอย่างเช่นสวิตช์กันชนสามารถวางไว้ที่ด้านหลังของหุ่นยนต์ (ดังในภาพตัวอย่างด้านล่าง) และใช้เพื่อหยุดหุ่นยนต์จากการขับขี่เมื่อมีการกด สถานการณ์นี้กำหนดให้สวิตช์กันชนต้องมีเส้นทางที่ชัดเจนระหว่างด้านหน้าของเซ็นเซอร์และวัตถุใดๆที่ถูกกดกับเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าไม่มีโครงสร้างบนหุ่นยนต์อยู่ด้านหน้าของปุ่มบนใบหน้าของเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าคุณจะได้รับการอ่านที่ถูกต้องเมื่อกดปุ่มของคุณ
ออปติคัลเซนเซอร์
ออปติคัลเซนเซอร์คือการรวมกันของเซ็นเซอร์แสงโดยรอบเซ็นเซอร์สีและเซ็นเซอร์ความใกล้ชิด ออปติคัลเซนเซอร์สามารถทำสิ่งเหล่านี้ให้สำเร็จได้เมื่อได้รับพลังงานแสงและแปลงพลังงานให้เป็นสัญญาณไฟฟ้า อุปกรณ์อิเล็กทรอนิกส์ภายในของเซ็นเซอร์ (เครื่องสถานะฮาร์ดแวร์) แปลงสัญญาณเหล่านี้เป็นสัญญาณเอาต์พุตที่จะได้รับเป็นอินพุตโดย EXP Brain
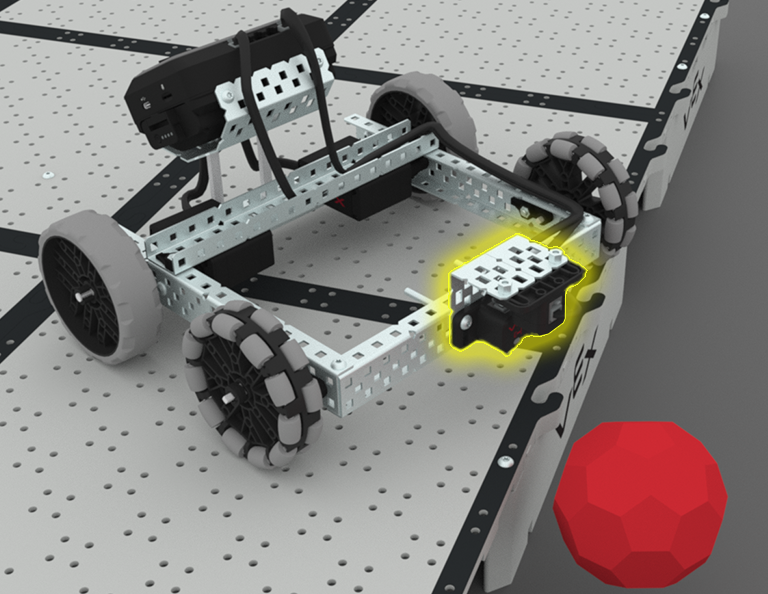
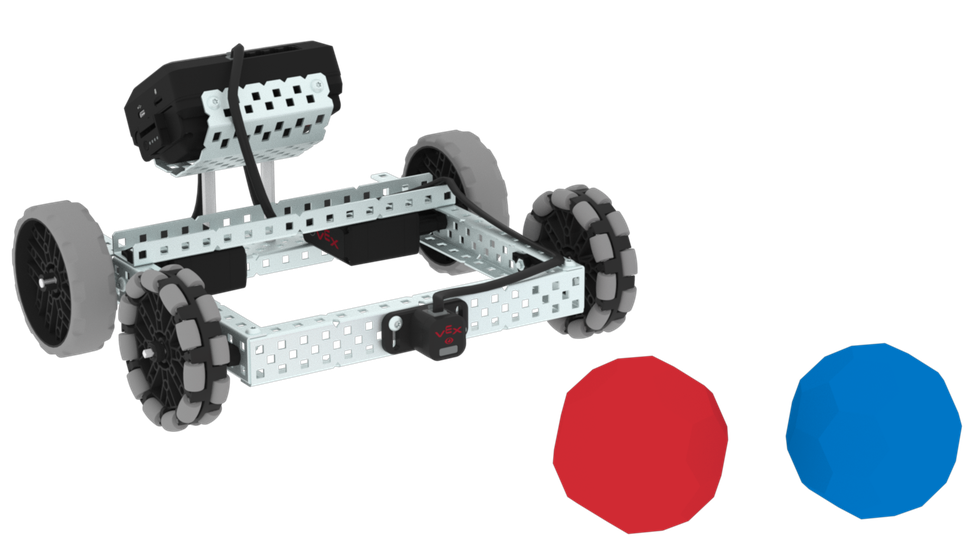
อีกครั้งตำแหน่งของเซ็นเซอร์ขึ้นอยู่กับสถานการณ์การใช้งานทั้งหมด สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับออปติคัลเซนเซอร์ที่กำหนดสีของวัตถุอื่น ตัวอย่างเช่นออปติคัลเซนเซอร์สามารถติดตั้งได้ที่ด้านหน้าของ EXP BaseBot และใช้เพื่อแยกแยะสีของบัคกี้บอล (ดังที่แสดงในภาพทางด้านขวา) สถานการณ์นี้กำหนดให้ออปติคัลเซนเซอร์ต้องมีเส้นทางที่ชัดเจนด้านหน้าของเซ็นเซอร์ระหว่างวัตถุใดๆที่ถูกวัดและเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าไม่มีโครงสร้างบนหุ่นยนต์อยู่ด้านหน้าของหน้าต่างออปติคัลเซนเซอร์ขนาดเล็กบนใบหน้าของเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าคุณจะได้รับการอ่านที่ถูกต้องเมื่อวัตถุเข้ามาในมุมมองของมัน
เซ็นเซอร์ระยะทาง
เซ็นเซอร์ระยะทางมีความสามารถในการวัดระยะทางตรวจจับวัตถุกำหนดขนาดสัมพัทธ์ของวัตถุและรายงานความเร็วของวัตถุ เซ็นเซอร์ระยะทางสามารถทำสิ่งเหล่านี้ให้สำเร็จได้ในขณะที่มันส่งชีพจรของเลเซอร์คลาส 1 ออกมาและวัดระยะเวลาที่ใช้ในการสะท้อนชีพจร
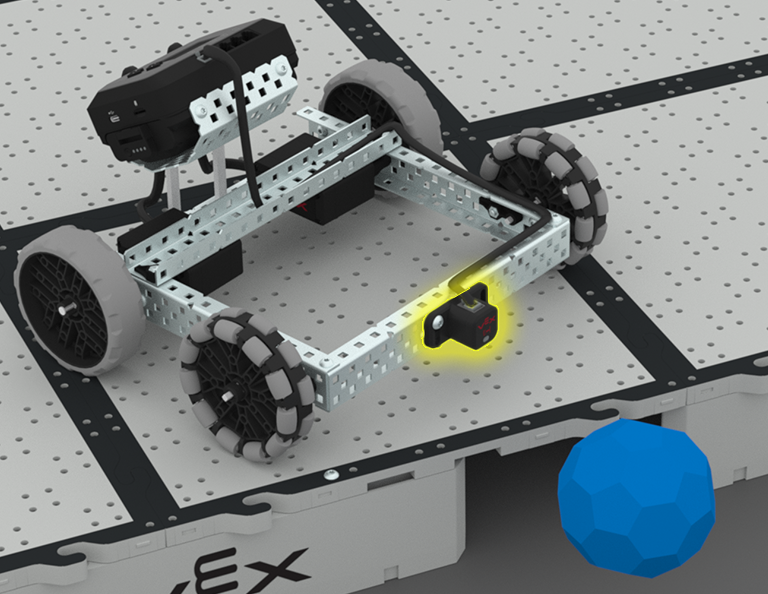
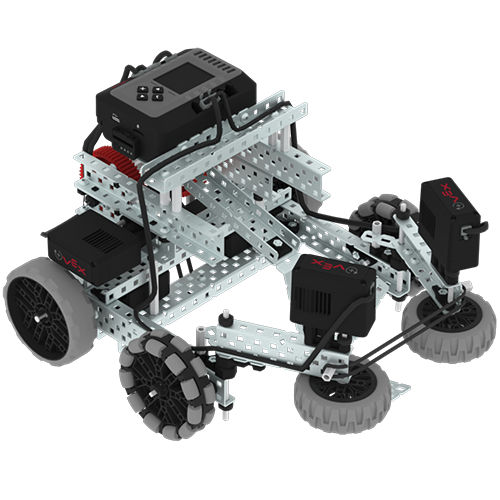
สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับเซ็นเซอร์ระยะทางที่กำหนดระยะทางไปยังวัตถุอื่น ตัวอย่างเช่นเซ็นเซอร์ระยะทางสามารถติดตั้งได้ที่ด้านหน้าของ EXP BaseBot และใช้เพื่อแยกแยะว่าเซ็นเซอร์อยู่ห่างจากบัคกี้บอลส์แค่ไหน BaseBot อาจถูกเข้ารหัสเพื่อขับไปยัง Buckyballs และผลักออกจากฟิลด์ที่ยกขึ้น (ตามที่แสดงในภาพด้านล่าง) สถานการณ์นี้กำหนดให้มีเส้นทางที่ชัดเจนด้านหน้าของเซ็นเซอร์ระหว่างวัตถุใดๆที่กำลังวัดและเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าไม่มีโครงสร้างบนหุ่นยนต์อยู่ด้านหน้าหน้าต่างเซ็นเซอร์ขนาดเล็กบนใบหน้าของเซ็นเซอร์ ตรวจสอบให้แน่ใจว่าคุณจะได้รับการอ่านที่ถูกต้องเมื่อวัตถุเข้ามาในมุมมองของมัน
ข้อมูลเซ็นเซอร์เฉื่อยจาก VEX EXP Brain
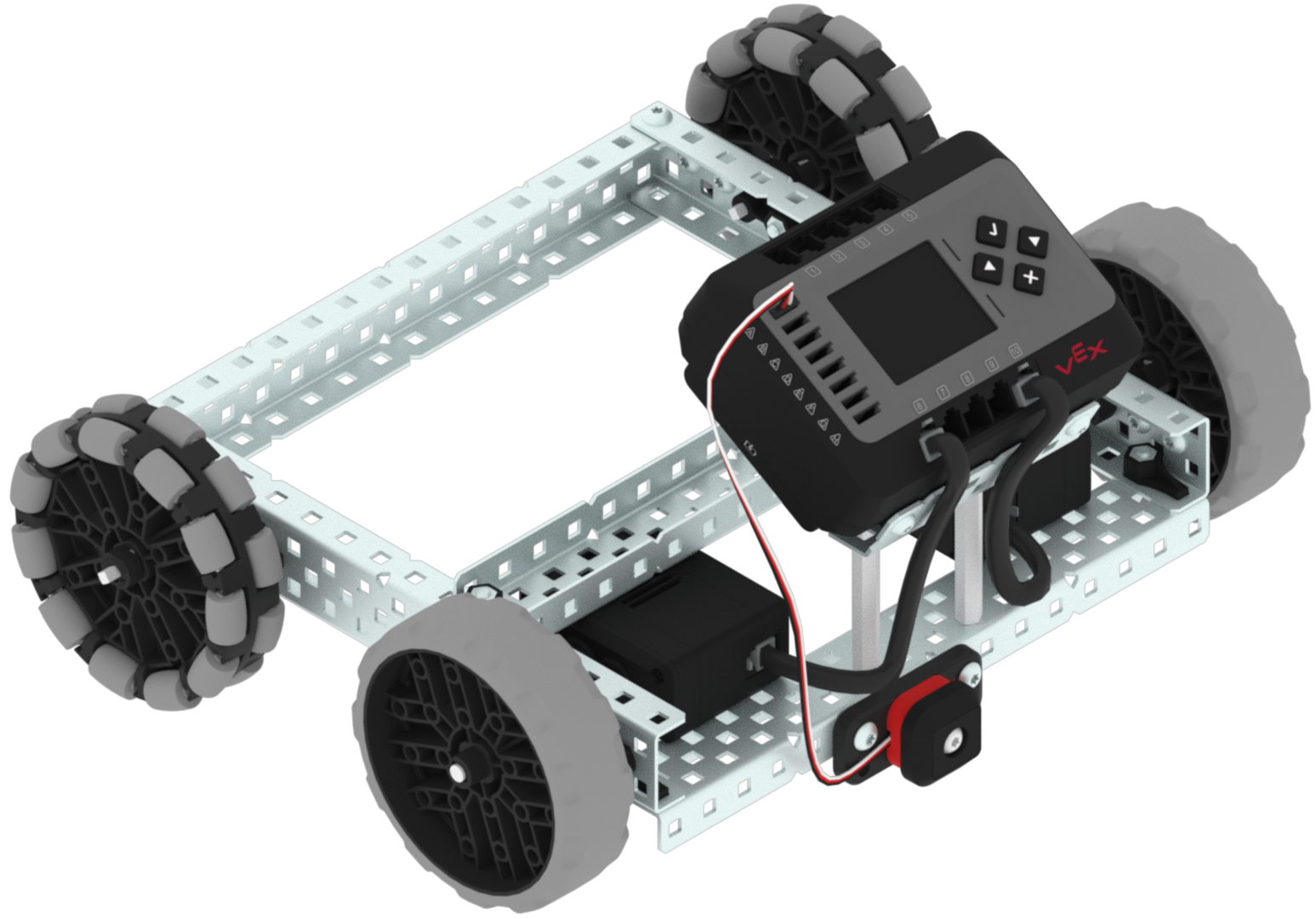
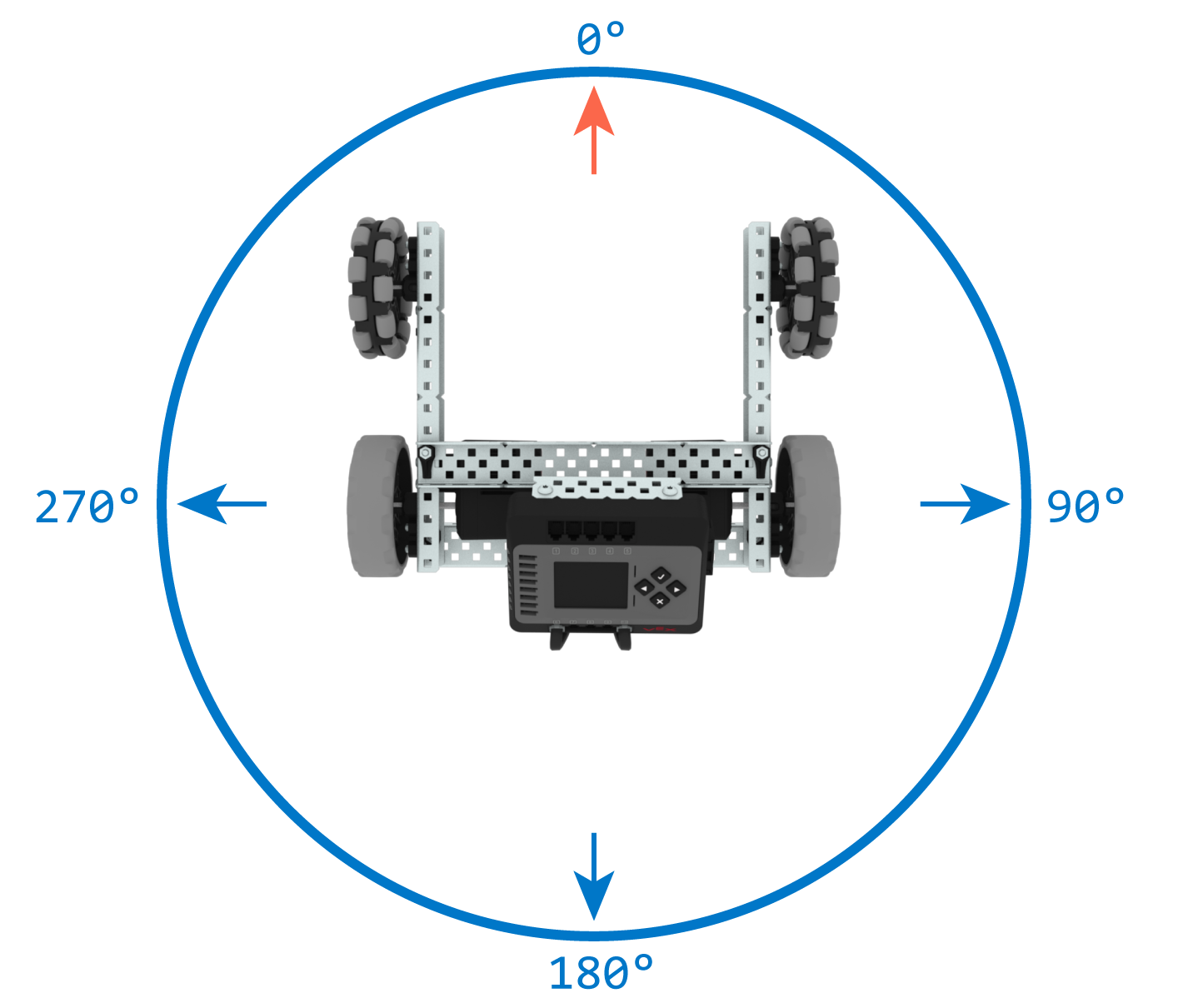
Vex EXP Brain มี Inertial Sensor ในตัว เซ็นเซอร์เฉื่อยรายงานข้อมูลเกี่ยวกับการมุ่งหน้าการหมุนการวางแนวและการเร่งความเร็วในแดชบอร์ด เซ็น เซอร์และใน VEXcode EXP สิ่งสำคัญคือต้องรู้ว่าเมื่อติดตั้ง Brain ของคุณให้พยายามติดตั้งในลักษณะที่หัวเรื่องระยะพิทช์ม้วนและหันไปตามหัวเรื่องของหุ่นยนต์เพื่อความเรียบง่าย สิ่งนี้จะถูกนำมาพิจารณากับ BaseBot, Clawbot และ CatapultBot (ภาพด้านล่าง) แต่ควรได้รับการพิจารณาด้วยการสร้างที่กำหนดเอง หากสมองของคุณไม่สอดคล้องกับหุ่นยนต์ของคุณข้อมูลที่คุณได้รับอาจผิดพลาดได้

การใช้งาน
เป็นการดีที่จะคิดว่าเซ็นเซอร์เหล่านี้ให้ชีวิตทางเทคนิคแก่การสร้างเหล่านี้อย่างไรเนื่องจากได้รับการออกแบบตามประสาทสัมผัสในชีวิตจริงของเรา ลองคิดดูในทางปฏิบัติท่านจะใช้ความรู้สึกบางอย่างในสถานการณ์ใด?
สวิตช์กันชน
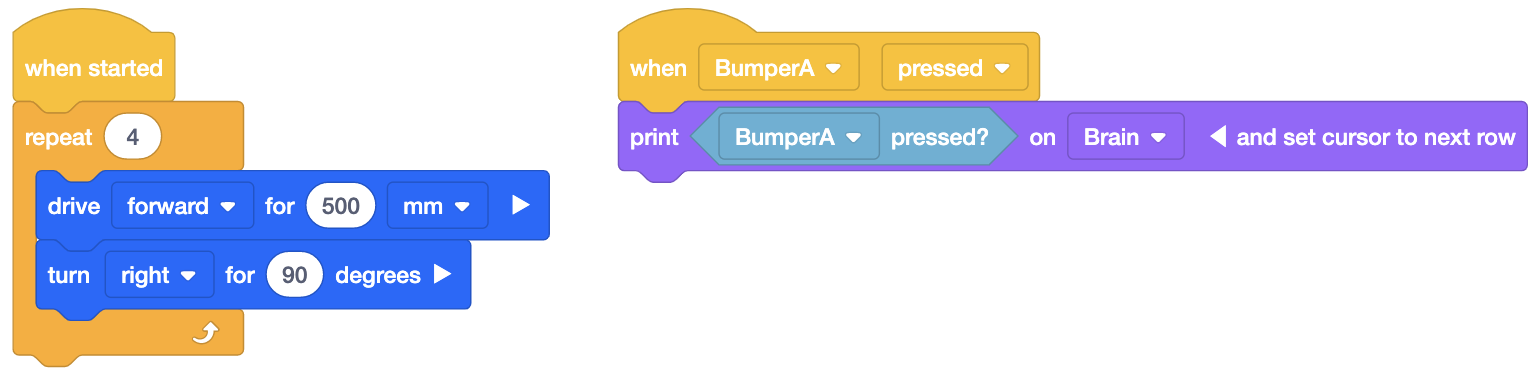
หลังจากที่คุณเพิ่มสวิตช์กันชน เป็นอุปกรณ์ใน VEXcode EXP แล้วมีสองสถานการณ์หลักที่มีประโยชน์ สถานการณ์เหล่านี้เกี่ยวข้องกับเมื่อรหัสสัมผัสการกดและเหตุการณ์กันชน การตรวจจับการกดช่วยให้หุ่นยนต์ของคุณสามารถตรวจจับเมื่อมีบางสิ่งกดบนสวิตช์กันชนในขณะที่เหตุการณ์กันชนช่วยให้คุณสามารถเรียกใช้รหัสเฉพาะเมื่อตรวจจับบางสิ่งกดบนสวิตช์กันชน สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับกันชนที่กำหนดว่าหุ่นยนต์ของคุณสัมผัสกับวัตถุอื่นหรือไม่ ในภาพแรกด้านล่างผู้ใช้ได้เขียนรหัสไว้ว่าหากสวิตช์กันชนสัมผัสกับสิ่งใดหุ่นยนต์จะหยุดขับไปข้างหน้า เมื่อรู้การใช้สวิตช์กันชนแล้วคุณสามารถตั้งรหัสให้หุ่นยนต์ของคุณทำอะไรก็ได้หลังจากกดแล้ว
ตัวอย่างเช่นคุณสามารถเขียนโค้ดเพื่อสำรองข้อมูลเลี้ยวหยุดขับหรือจบโปรเจกต์ทั้งหมด อีกสถานการณ์หนึ่งเกี่ยวข้องกับสวิตช์กันชนที่วางไว้ใกล้กับด้านบนของหุ่นยนต์และหลีกเลี่ยงชิ้นส่วนโครงสร้างที่จะใช้เป็นตัวหยุดฉุกเฉินโดยผู้ปฏิบัติงาน คล้ายกับตัวอย่างก่อนหน้านี้เราสามารถวิเคราะห์ข้อมูลและใช้ในการตัดสินใจได้ ตัวอย่างที่พวกเขาใช้ในภาพด้านขวาคือการพิมพ์ว่าสวิทช์กันชนถูกกดลงบนสมอง ท่านนึกถึงประโยชน์อะไรได้บ้าง? ลองคิดแบบนี้ถ้าคุณชนรถของคุณเข้ากับกำแพงปฏิกิริยาของคุณคืออะไร? ย้อนกลับ? หยุดขับใช่ไหม
ออปติคัลเซนเซอร์
ออปติคัลเซนเซอร์เป็นเครื่องมืออเนกประสงค์และมีการใช้งานที่หลากหลาย หลังจากที่คุณ เพิ่มออปติคัลเซน เซอร์เป็นอุปกรณ์ใน VEXcode EXP แล้วคุณสามารถตั้งรหัสและใช้ออปติคัลเซนเซอร์เพื่อ:
- เปิดหรือปิดไฟ LED สีขาวของเซ็นเซอร์
- ตั้งค่าเปอร์เซ็นต์พลังงานของไฟ LED สีขาว
- ตรวจหาวัตถุ
- ตรวจหาสี
- วัดเปอร์เซ็นต์ความสว่างของแสงโดยรอบ
- วัดความเข้มสีของสีเป็นองศา
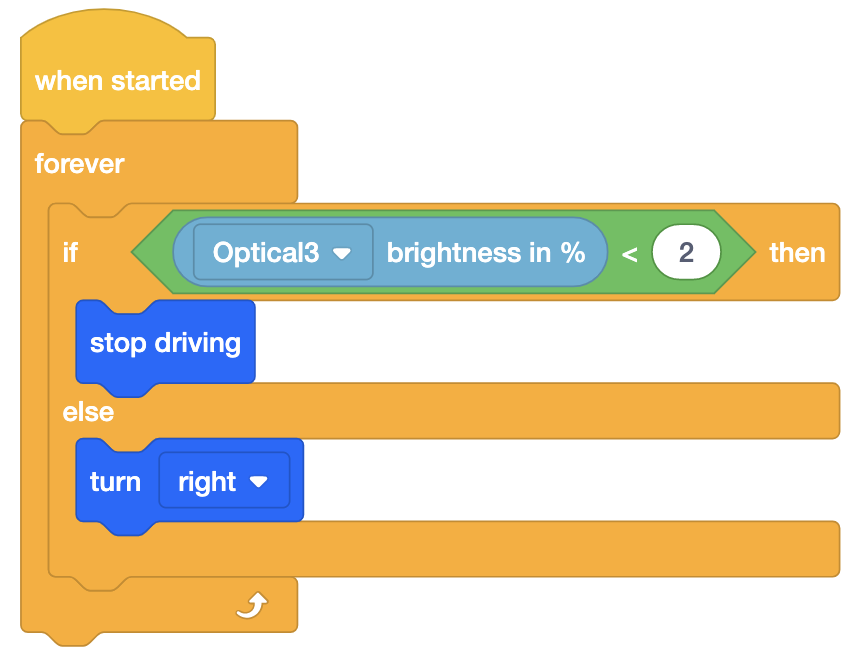
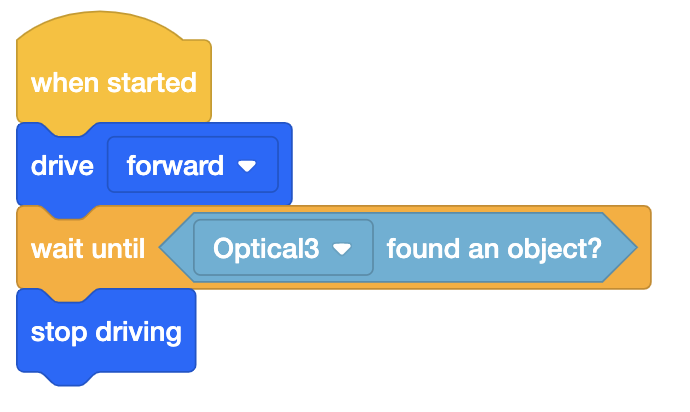
สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับออปติคัลเซนเซอร์ที่กำหนดสีของวัตถุอื่น ต่อไปการวิเคราะห์ข้อมูลจะขึ้นอยู่กับสิ่งที่คุณใช้เซ็นเซอร์ทั้งหมด อยากให้หุ่นยนต์พันบัคกี้บอลสีเดียวไหม? หลีกเลี่ยงสีบางสีใช่ไหม? หยุดขับเมื่อพบสีเฉพาะหรือไม่ ออปติคัลเซนเซอร์เป็นเครื่องมือที่ยอดเยี่ยมเนื่องจากคุณสามารถใช้งานได้ทุกวิธีที่คุณคิดว่าเกี่ยวข้องกับความเข้มสีหรือการตรวจจับแสงโดยรอบ สถานการณ์อื่นๆรวมถึงหุ่นยนต์หยุดขับเมื่อตรวจพบวัตถุหุ่นยนต์หยุดขับเมื่อความสว่างมากกว่าค่าที่กำหนดหรือที่อื่นๆที่จำเป็นสำหรับการตรวจจับสีและความสว่างสำหรับหุ่นยนต์
เซ็นเซอร์ระยะทาง
เซ็นเซอร์ระยะทางสามารถสร้างการวัดหลายแบบซึ่งสามารถใช้เพื่อเปลี่ยนพฤติกรรมของหุ่นยนต์ เมื่อเพิ่มลงในVEXcode EXP Brain ร่วมกับโครงการผู้ใช้สามารถใช้เพื่อแปลงการอ่านเซ็นเซอร์ระยะทางเป็น:
- ระยะห่างจากวัตถุวัดเป็นเซนติเมตรมิลลิเมตรหรือนิ้ว
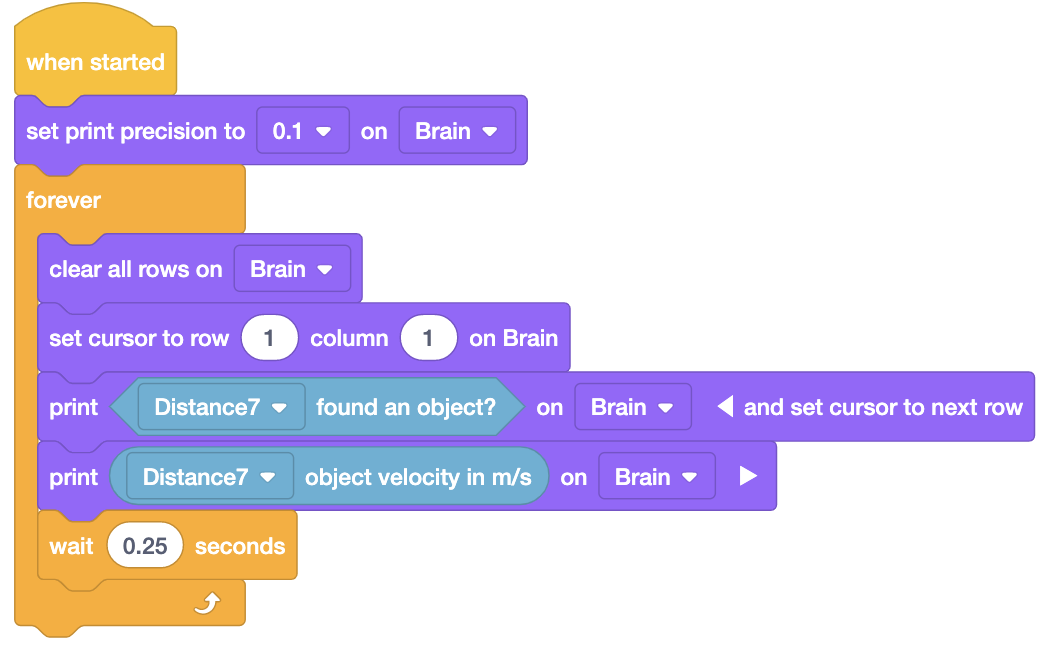
- ความเร็วของวัตถุเป็นเมตรต่อวินาที
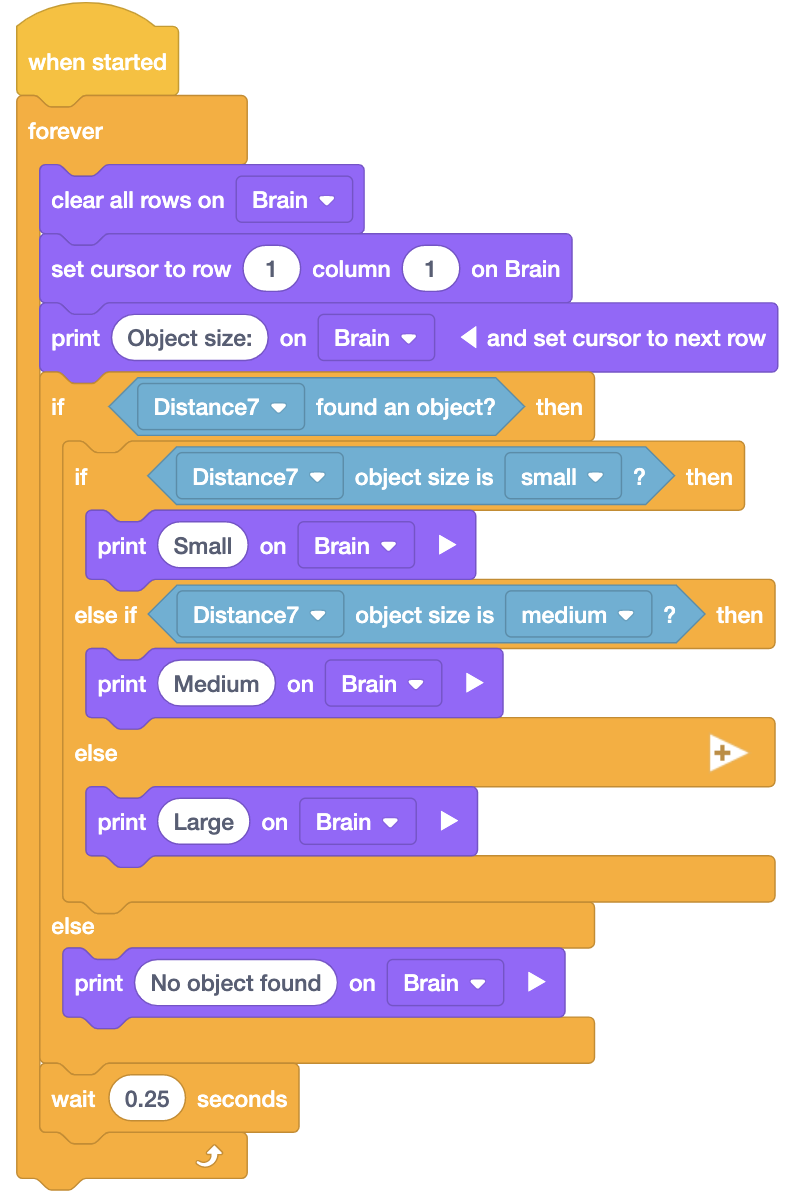
- ขนาดวัตถุมีขนาดเล็กกลางหรือใหญ่
- พบวัตถุ
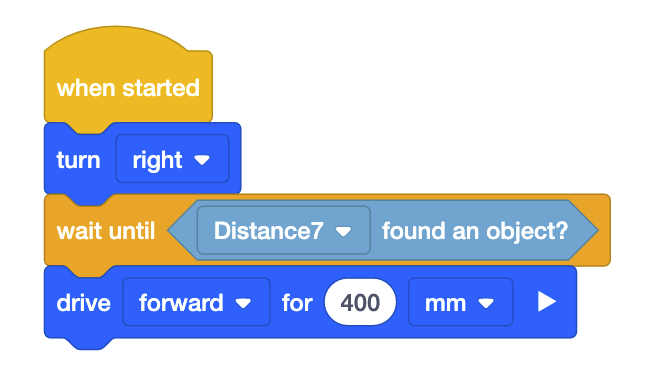
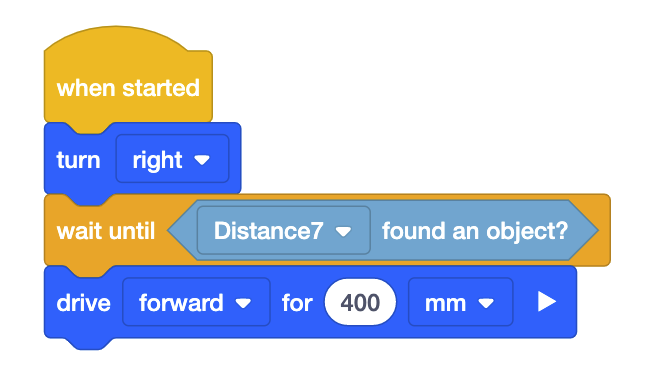
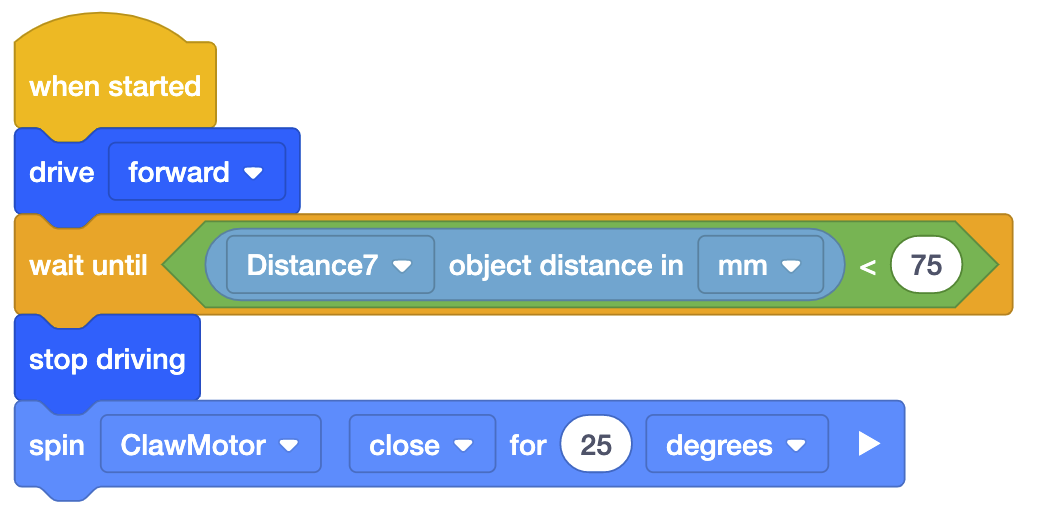
สถานการณ์ที่ใช้มากที่สุดกับ EXP เกี่ยวข้องกับเซ็นเซอร์ระยะทางที่กำหนดระยะทางไปยังวัตถุอื่น เช่นเดียวกับตัวอย่างที่ระบุไว้กับเซ็นเซอร์อื่นๆการใช้งานขึ้นอยู่กับสถานการณ์และสิ่งที่คุณต้องการ ในภาพแรกรหัสจะเรียกให้หุ่นยนต์หมุนจนกว่าจะตรวจพบวัตถุและขับไปข้างหน้า 400 มม. เมื่อตรวจพบ ตัวอย่างที่สองมี Clawbot ปิดกรงเล็บเมื่อวัตถุอยู่ใกล้กว่า 75 มม. สถานการณ์อื่นๆรวมถึงหุ่นยนต์ตรวจจับวัตถุและไม่ว่าจะเป็นการหลีกเลี่ยงหรือการเข้าใกล้วัตถุการกำหนดระยะทางที่จะคว้าวัตถุการรายงานความเร็วของวัตถุบนสมองเช่นเดียวกับขนาดสัมพัทธ์ของวัตถุทั้งสำหรับผู้ปฏิบัติงานของหุ่นยนต์ การใช้ฟังก์ชันใดๆของเซ็นเซอร์ระยะทางช่วยให้คุณสามารถตอบสนองต่อสิ่งที่เกิดขึ้นได้ คำถามที่ตามมาคือ คุณ ต้องการให้หุ่นยนต์ของคุณตอบสนองอย่างไร?
ข้อมูลเซ็นเซอร์เฉื่อยจาก VEX EXP Brain
การใช้ข้อมูลจาก Inertial Sensor จะรวมอยู่ในรหัสของคุณ ทำความเข้าใจว่าคุณสามารถลดความเร็วของหุ่นยนต์เปลี่ยนหัวเรื่องระยะพิทช์หันเหหรือหมุนได้เนื่องจากเซ็นเซอร์แรงเฉื่อย เมื่อคุณบอกให้หุ่นยนต์เลี้ยวขวาไม่ว่าจะผ่าน VEXcode หรือตัวควบคุมมันจะแจ้งให้หัวเรื่องเปลี่ยนไปตามนั้น การใช้เซ็นเซอร์นี้ช่วยให้คุณสามารถเคลื่อนย้ายหุ่นยนต์ของคุณไปในอวกาศได้
แอปพลิเคชัน
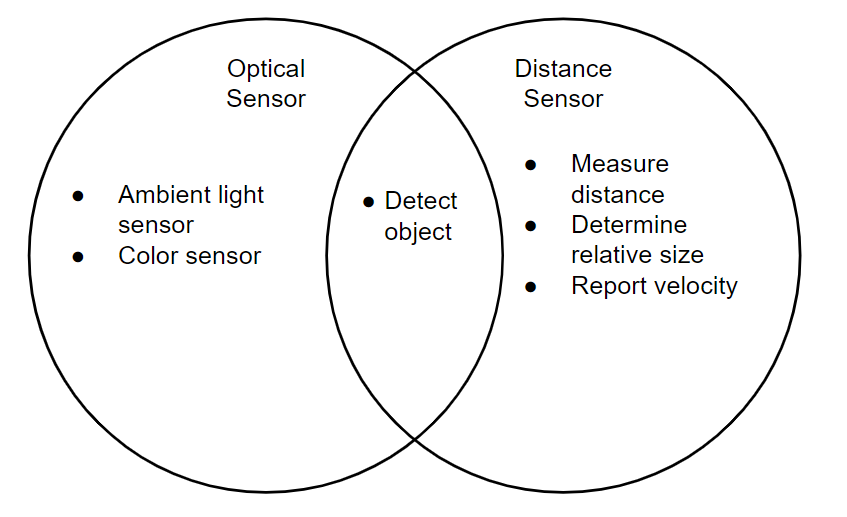
การใช้ข้อมูลที่ให้ไว้ข้างต้นหากเกิดสถานการณ์ที่จำเป็นต้องใช้เซ็นเซอร์ตรวจสอบให้แน่ใจว่าได้วางไว้ในตำแหน่งที่เหมาะสมที่สุดในการสร้างของคุณต่อการใช้งาน ยังไม่แน่ใจใช่ไหม? ใส่ตัวเองในรองเท้าของหุ่นยนต์ ตำแหน่งที่ดีที่สุดสำหรับดวงตาของคุณอยู่ที่ไหน? แล้วการสัมผัสล่ะ? เมื่อพูดถึงเซ็นเซอร์ที่คุณควรใช้ไม่มีคำตอบที่ถูกต้อง คุณควรยึดหลักสิ่งที่คุณต้องทำและเซ็นเซอร์ใดที่สามารถทำงานนั้นให้สำเร็จได้ ดูแผนภาพเวนน์ด้านล่างหากคุณต้องการใช้เซ็นเซอร์เพื่อตรวจจับวัตถุคุณสามารถใช้เซ็นเซอร์ระยะทางหรือออปติคัลเซนเซอร์ ทำความเข้าใจว่าเซ็นเซอร์แต่ละตัวมีความสามารถของตัวเองจากนั้นเลือกเซ็นเซอร์ที่จะตอบสนองความต้องการของคุณได้
จำไว้ว่า EXP ก็เท่ากับ V5 ในห้องเรียนเช่นกัน เซ็นเซอร์ V5 มีความเข้ากันได้ย้อนหลังกับสมอง EXP เช่นเดียวกับรหัสและพวกเขายังถูกนำไปใช้ในรหัส ต้องการสัมผัสมากขึ้นด้วย EXP Kit ของคุณหรือไม่? ลองใช้เซ็นเซอร์ของ V5