


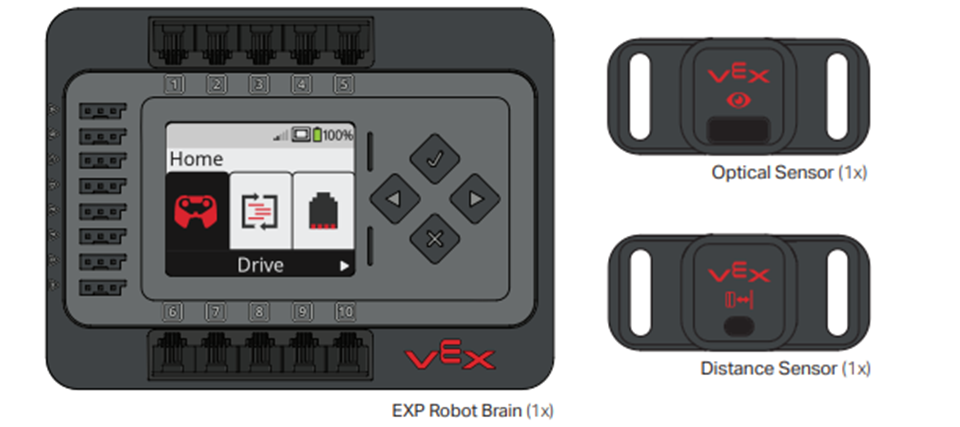
Analysieren und Anwenden von EXP-Sensordaten
Übersicht
Sensoren im EXP-System tun genau das, was ihr Name vermuten lässt; sie spüren Dinge. Ohne diese Sensoren hat Ihr Gebäude eine hypothetische Decke über dem Kopf, was es leisten kann. Das heißt, wir müssten jeden einzelnen Aspekt in Bezug auf unseren Roboter sorgfältig berücksichtigen und ihn in Code umwandeln. Der Einsatz von Sensoren stimmt eng mit dem Sprichwort überein, intelligenter zu denken, nicht härter. Der schwierige Teil bei der Verwendung von Sensoren besteht darin, die von ihnen bereitgestellten relevanten Informationen zu analysieren und anzuwenden, auf die in diesem Artikel näher eingegangen wird.
Information und Platzierung
Sensoren sollten in Bezug auf ihre Verwendung an der bestmöglichen Stelle montiert werden. Zum Beispiel sollte ein Stoßfängerschalter in einer Höhe platziert werden, in der er mit einem anderen Teil kollidiert, ein optischer Sensor sollte dort platziert werden, wo er auf einen Fremdkörper trifft, und ein Abstandssensor sollte dort platziert werden, wo viel Platz davor ist. Zu verstehen , wo diese Sensoren entsprechend ihrer Verwendung zu montieren sind, ist der erste Schritt bei der Anwendung von EXP-Sensordaten. Schauen wir uns diese Beispiele genauer an.
Stoßstangenschalter
Der vex Bumper Switch basiert auf dem wohl am häufigsten verwendeten elektrischen Gerät: dem Switch. Ein Schalter besteht aus zwei Anschlüssen (Stellen, an denen ein Draht befestigt werden kann) und einer Drahtbrücke, um die Verbindung herzustellen, wenn der Schalter gedrückt wird, die vom Robotergehirn empfangen wird. Die Platzierung des Switches hängt ganz vom Einsatzszenario ab. Das am häufigsten bei EXP verwendete Szenario besteht darin, dass die Stoßstange bestimmt, ob Ihr Roboter mit einem anderen Objekt in Kontakt gekommen ist. Zum Beispiel könnte der Stoßstangenschalter auf der Rückseite des Roboters platziert werden (wie im Beispielbild unten) und verwendet werden, um den Roboter am Fahren zu hindern, wenn er gedrückt wird. In diesem Szenario muss der Stoßstangenschalter einen freien Weg zwischen der Vorderseite des Sensors und jedem Objekt haben, das gegen den Sensor gedrückt wird. Stellen Sie sicher, dass sich keine Struktur am Roboter vor der Taste auf der Vorderseite des Sensors befindet. Wenn Sie dies sicherstellen, erhalten Sie genaue Messwerte, wenn Sie Ihre Taste drücken.
Optischer Sensor
Der optische Sensor ist eine Kombination aus Umgebungslichtsensor, Farbsensor und Näherungssensor. Der optische Sensor ist in der Lage, diese zu erreichen, da er Lichtenergie empfängt und die Energie in elektrische Signale umwandelt. Die interne Elektronik des Sensors (eine Hardware-Zustandsmaschine) wandelt diese Signale in Ausgangssignale um, die vom EXP Brain als Eingang empfangen werden.
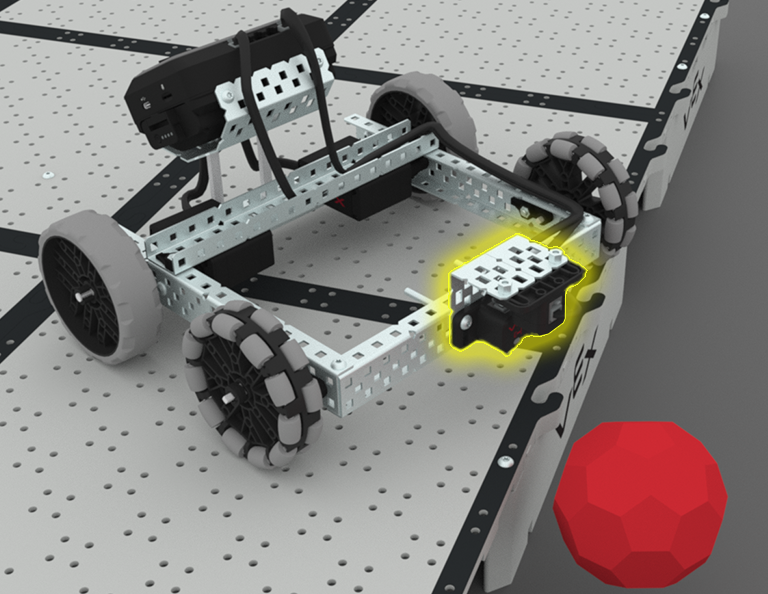
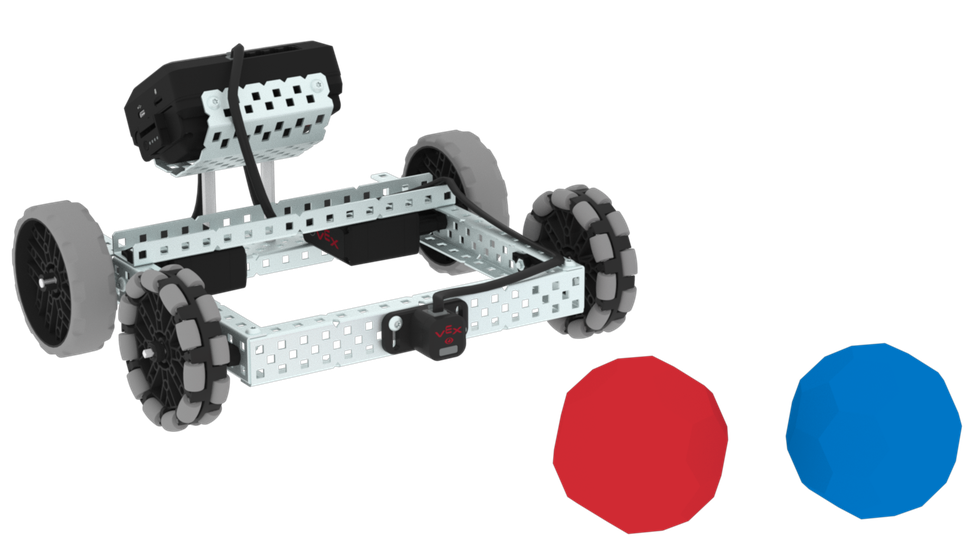
Auch hier hängt die Platzierung des Sensors vollständig vom Einsatzszenario ab. Das am häufigsten bei EXP verwendete Szenario besteht darin, dass der optische Sensor die Farbe eines anderen Objekts bestimmt. Zum Beispiel kann der optische Sensor auf der Vorderseite des EXP BaseBot montiert werden und verwendet werden, um die Farbe von Buckyballs zu unterscheiden (wie im Bild rechts gezeigt). In diesem Szenario muss der optische Sensor einen freien Weg vor dem Sensor zwischen dem zu messenden Objekt und dem Sensor haben. Stellen Sie sicher, dass sich keine Struktur am Roboter vor dem kleinen optischen Sensorfenster auf der Vorderseite des Sensors befindet. Wenn Sie dies sicherstellen, erhalten Sie genaue Messwerte, wenn ein Objekt in seine Sicht kommt.
Abstandssensor
Der Abstandssensor verfügt über die Fähigkeit, Entfernungen zu messen, Objekte zu erkennen, die relative Größe des Objekts zu bestimmen und die Objektgeschwindigkeit zu melden. Der Abstandssensor ist in der Lage, diese zu erreichen, da er einen Impuls eines Lasers der Klasse 1 aussendet und die Zeit misst, die der Impuls benötigt, um reflektiert zu werden.
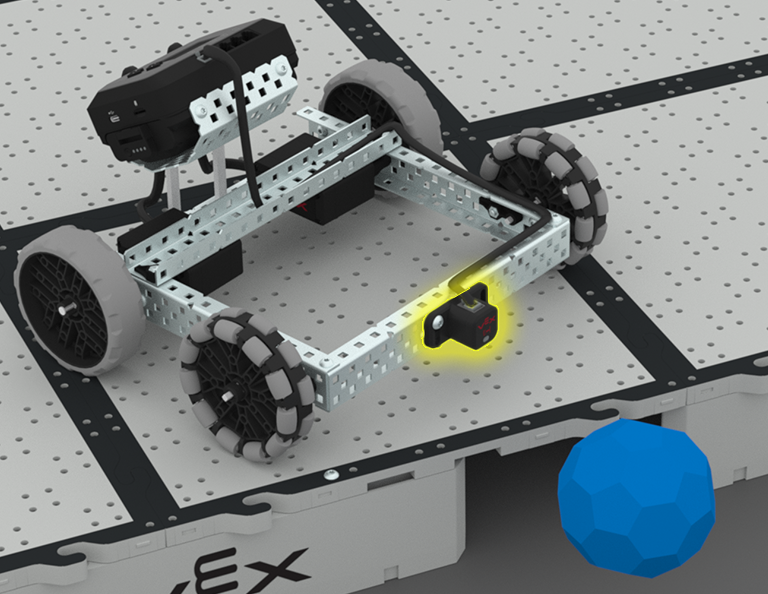
Das am häufigsten bei EXP verwendete Szenario besteht darin, dass der Abstandssensor die Entfernung zu einem anderen Objekt bestimmt. Zum Beispiel kann der Abstandssensor auf der Vorderseite des EXP BaseBot montiert werden und verwendet werden, um zu unterscheiden, wie weit der Sensor von Buckyballs entfernt ist. Der BaseBot kann so codiert sein, dass er auf Buckyballs zufährt und sie von einem erhöhten Feld schiebt (wie in der Abbildung unten gezeigt). Dieses Szenario erfordert einen freien Weg vor dem Sensor zwischen jedem zu messenden Objekt und dem Sensor. Stellen Sie sicher, dass sich keine Struktur am Roboter vor dem Fenster des kleinen Sensors auf der Vorderseite des Sensors befindet. Wenn Sie dies sicherstellen, erhalten Sie genaue Messwerte, wenn ein Objekt in seine Sicht kommt.
Trägheitssensordaten des vex EXP-Gehirns
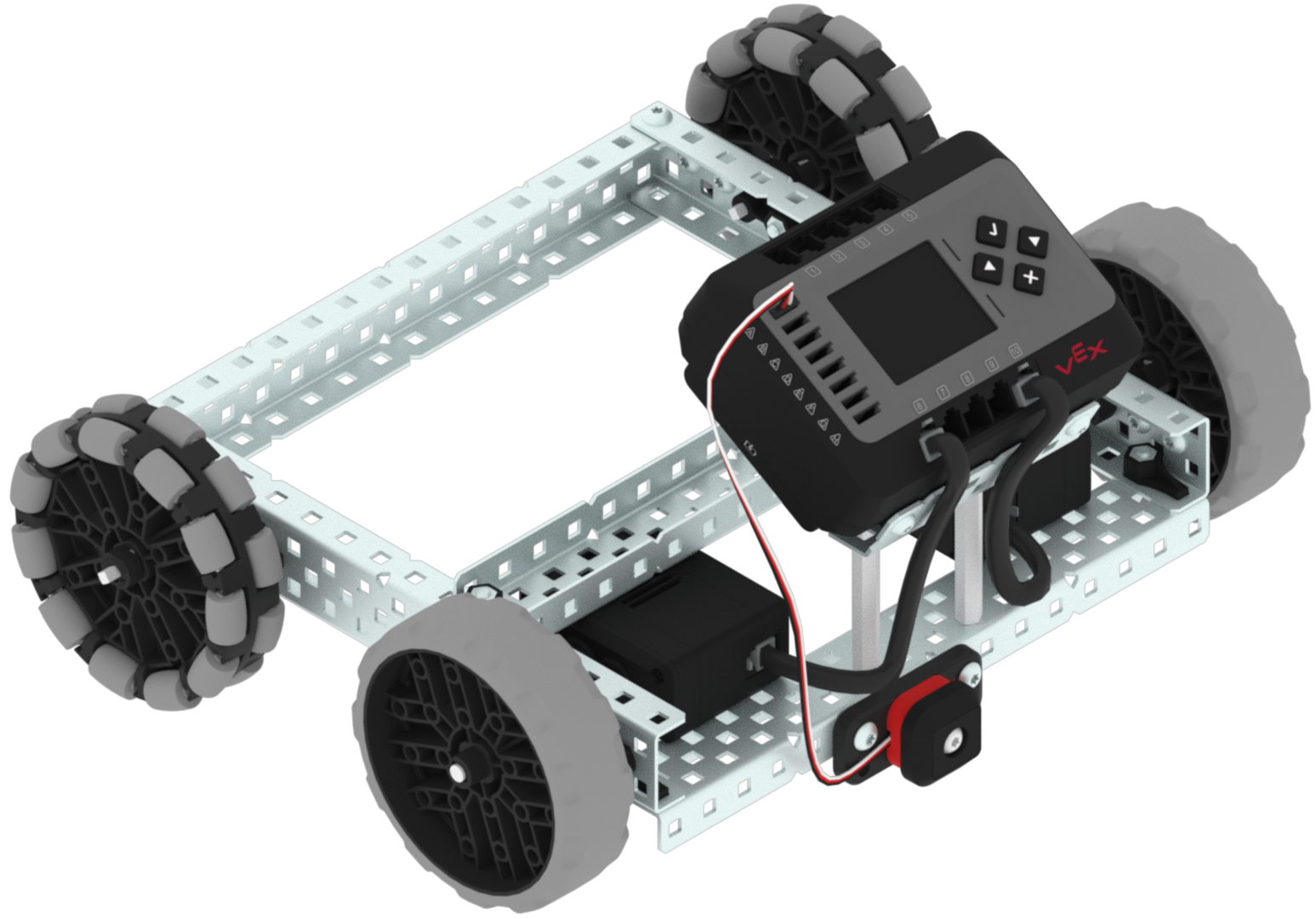
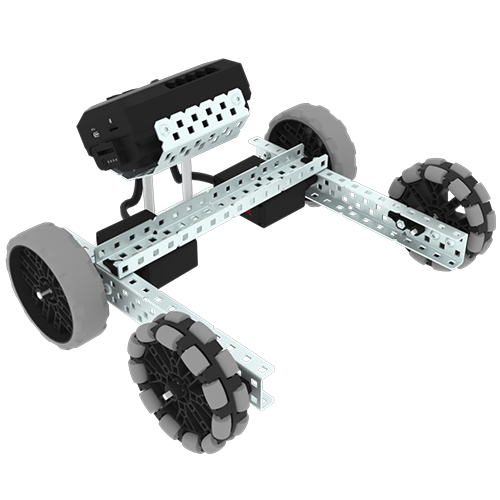
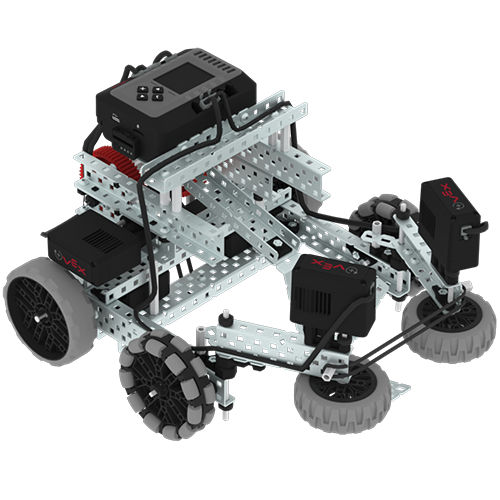
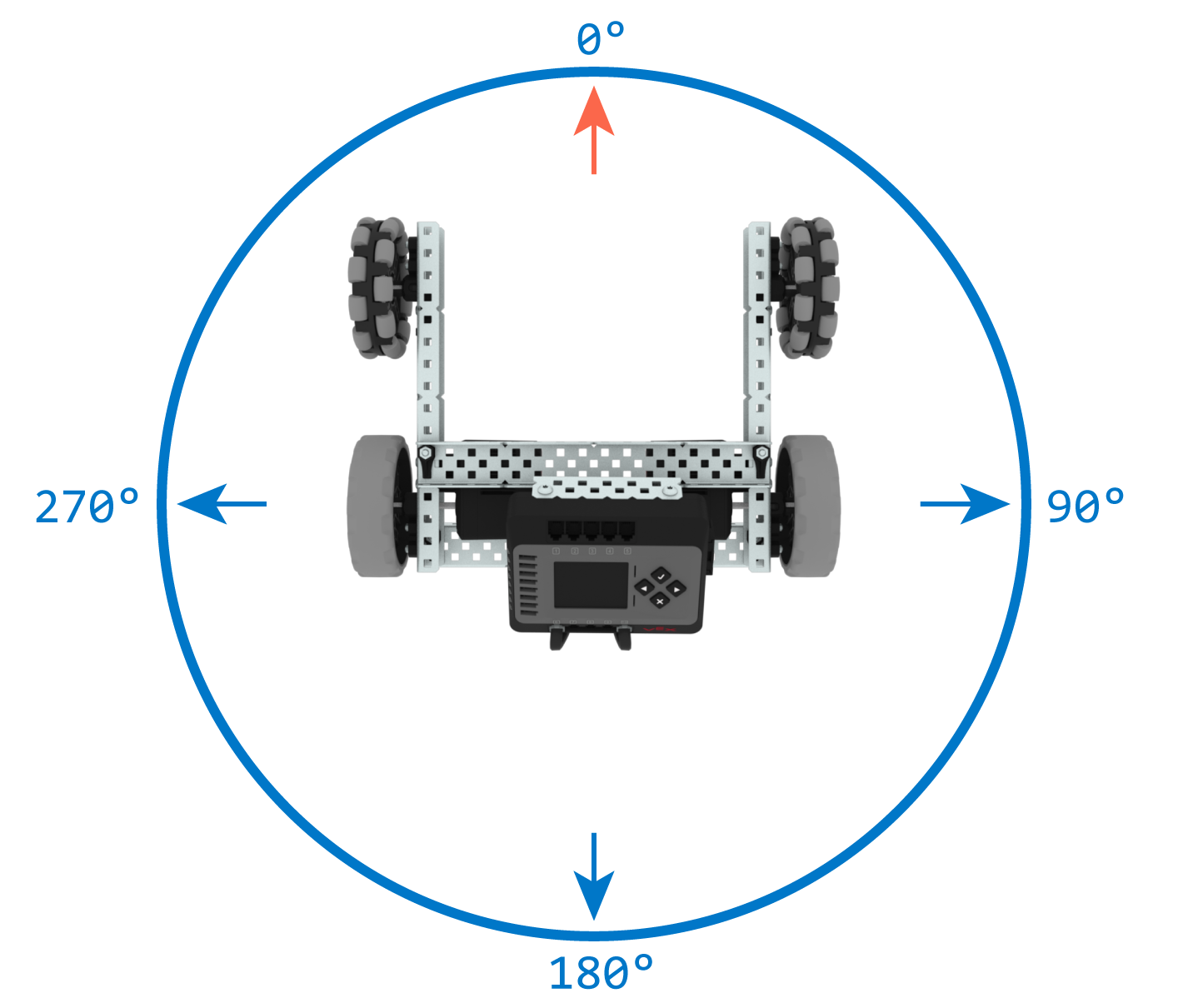
Das VEX EXP Gehirn verfügt über einen eingebauten Trägheitssensor. Der Trägheitssensor meldet Daten über Kurs, Drehung, Ausrichtung und Beschleunigung im Sensor-Dashboard und in VEXcode EXP. Es ist wichtig zu wissen, dass Sie bei der Montage Ihres Gehirns versuchen sollten, es so zu montieren, dass Kurs, Neigung, Rolle und Gierwinkel der Einfachheit halber mit dem Kurs des Roboters übereinstimmen. Dies wird bei BaseBot, Clawbot und CatapultBot berücksichtigt (Bild unten), sollte aber bei benutzerdefinierten Builds berücksichtigt werden. Wenn Ihr Gehirn nicht mit Ihrem Roboter ausgerichtet ist, haben die Daten, die Sie erhalten, das Potenzial, falsch zu sein.

Verwendung
Es ist cool, darüber nachzudenken, wie diese Sensoren diese Konstruktionen technisch zum Leben erwecken, da sie nach unseren realen Sinnen entwickelt wurden. Denken Sie in der Praxis darüber nach, in welchen Szenarien würden Sie einen bestimmten Sinn verwenden?
Stoßstangenschalter
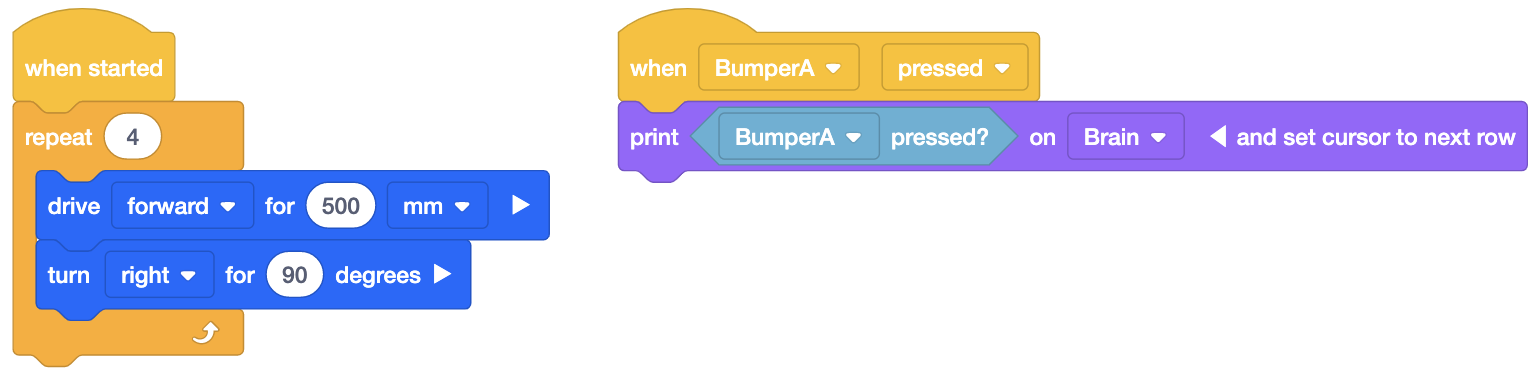
Nachdem Sie den Bumper Switch als Gerät in VEXcode EXP hinzugefügt haben, gibt es zwei Hauptszenarien, in denen er nützlich ist. Diese Szenarien beinhalten, wenn der Code eine Presse erkennt, und Stoßstangenereignisse. Die Druckerkennung ermöglicht es Ihrem Roboter zu erkennen, wenn etwas auf den Stoßstangenschalter drückt, während Stoßstangenereignisse es Ihnen ermöglichen, einen bestimmten Code auszuführen, wenn Sie etwas auf den Stoßstangenschalter drücken. Das am häufigsten bei EXP verwendete Szenario besteht darin, dass die Stoßstange bestimmt, ob Ihr Roboter mit einem anderen Objekt in Kontakt gekommen ist. Im ersten Bild unten hat der Benutzer codiert, dass der Roboter aufhört, vorwärts zu fahren, wenn der Stoßfängerschalter mit irgendetwas in Kontakt kommt. Wenn Sie die Verwendung des Stoßfängerschalters kennen, können Sie Ihren Roboter codieren, um alles zu tun, nachdem er gedrückt wurde.
Sie könnten es beispielsweise so programmieren, dass es gesichert, gedreht, nicht mehr gefahren oder einfach das gesamte Projekt beendet wird. Ein weiteres Szenario besteht darin, dass der Stoßstangenschalter in der Nähe der Oberseite des Roboters und außerhalb der Strukturteile platziert wird, die vom Bediener als Not-Aus verwendet werden können. Ähnlich wie im vorherigen Beispiel können wir die Daten analysieren und für eine Entscheidung verwenden. Das Beispiel, mit dem sie im Bild rechts laufen, ist der Druck, dass der Stoßstangenschalter auf das Gehirn gedrückt wurde. Welchen Nutzen können Sie sich vorstellen? Stellen Sie sich das so vor: Wenn Sie Ihr Auto gegen eine Wand prallen lassen, wie reagieren Sie darauf? Rückwärts? Aufhören zu fahren?
Optischer Sensor
Der optische Sensor ist ein vielseitiges Werkzeug und hat eine Reihe von Anwendungen. Nachdem Sie den optischen Sensor als Gerät in VEXcode EXP hinzugefügt haben, können Sie den optischen Sensor codieren und verwenden, um:
- Schalten Sie die weißen LED-Leuchten des Sensors ein oder aus.
- Stellen Sie den Prozentsatz der Leistung der weißen LED-Leuchten ein.
- Erkennen Sie ein Objekt.
- Erkennen Sie eine Farbe.
- Messen Sie die prozentuale Helligkeit des Umgebungslichts.
- Messen Sie den Farbton einer Farbe in Grad.
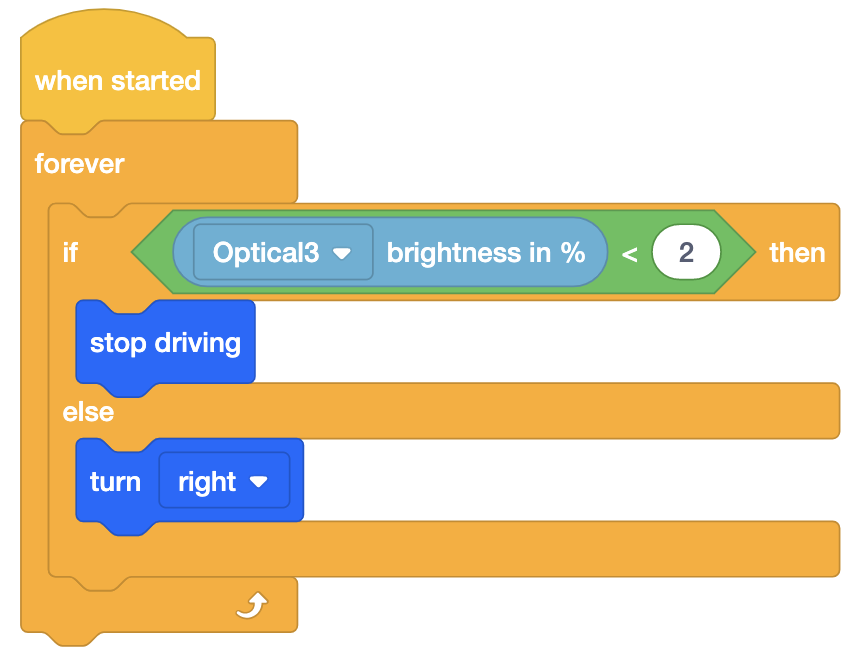
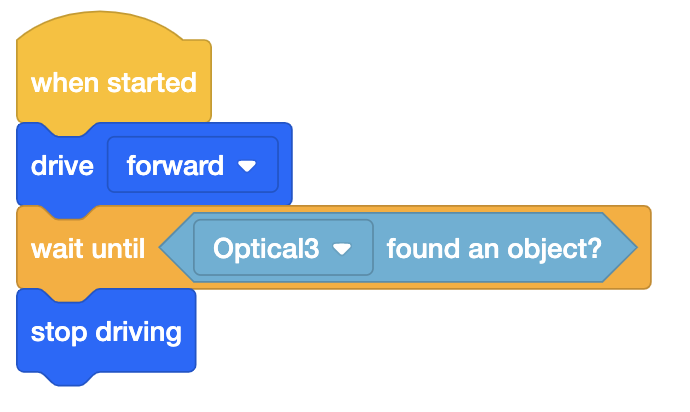
Das am häufigsten bei EXP verwendete Szenario besteht darin, dass der optische Sensor die Farbe eines anderen Objekts bestimmt. Als nächstes hängt die Analyse der Daten vollständig davon ab, wofür Sie den Sensor verwenden. Möchtest du, dass der Roboter Buckyballs einer Farbe aufwirbelt? Eine bestimmte Farbe vermeiden? Hören Sie auf zu fahren, sobald es eine bestimmte Farbe gefunden hat? Der optische Sensor ist ein großartiges Werkzeug, da Sie ihn auf jede erdenkliche Weise im Zusammenhang mit der Farbton- oder Umgebungslichterkennung verwenden können. Andere Szenarien beinhalten, dass der Roboter aufhört zu fahren, wenn ein Objekt erkannt wird, dass der Roboter aufhört zu fahren, wenn die Helligkeit größer als ein bestimmter Wert wird, oder dass an einer anderen Stelle eine Farb- und Helligkeitsmessung für den Roboter erforderlich ist.
Abstandssensor
Der Abstandssensor kann mehrere Messungen erzeugen, mit denen das Verhalten des Roboters geändert werden kann, sobald er zu VEXcode hinzugefügt wurde. Das EXP-BRAIN in Abstimmung mit einem Benutzerprojekt kann verwendet werden, um die Messwerte des Abstandssensors in Folgendes umzuwandeln:
- Abstand zu einem Objekt, gemessen in Zentimetern, Millimetern oder Zoll.
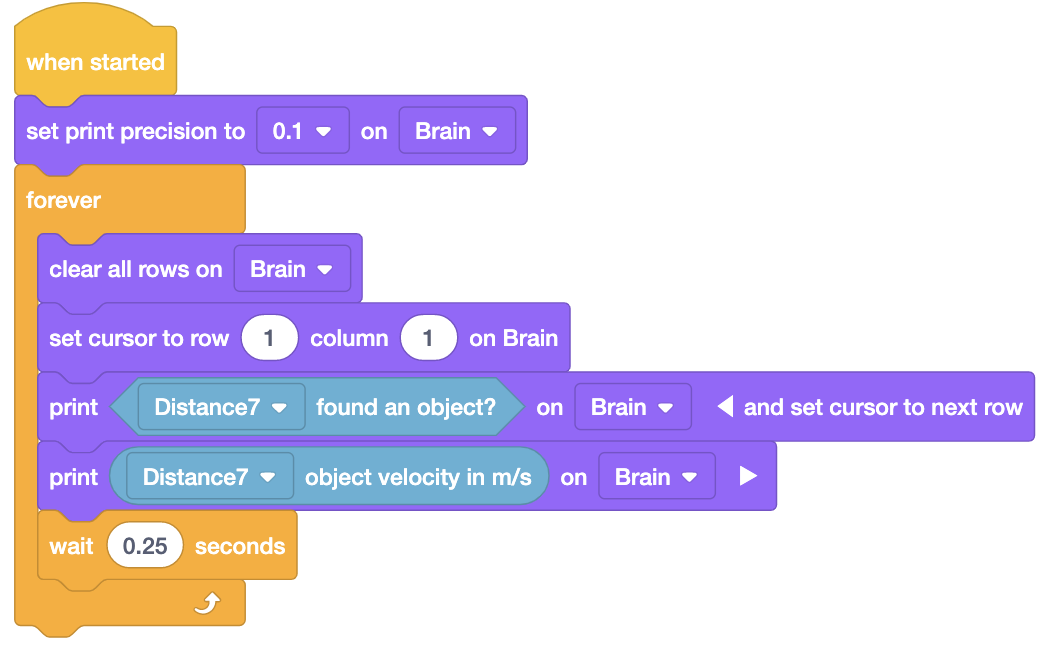
- Objektgeschwindigkeit in Metern pro Sekunde.
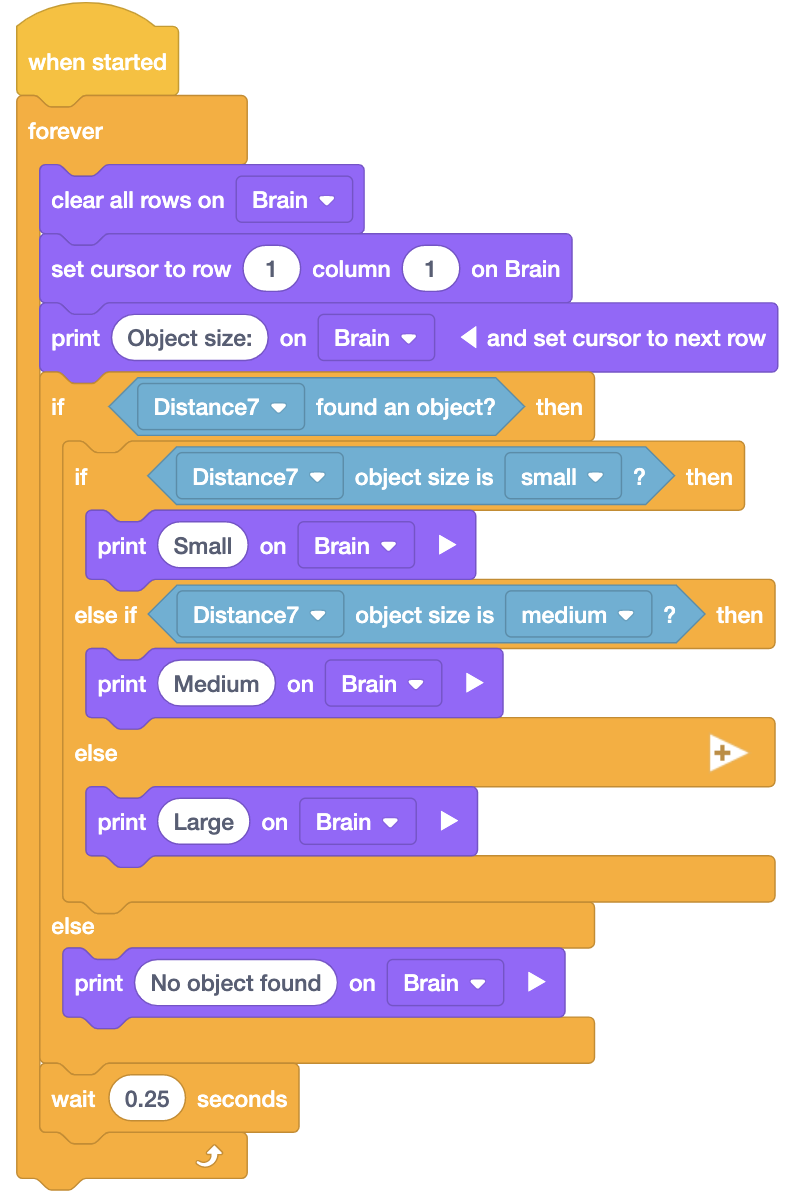
- Die Objektgröße ist klein, mittel oder groß.
- Objekt gefunden.
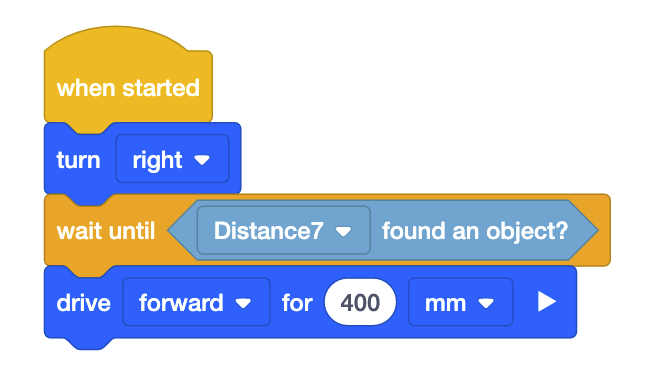
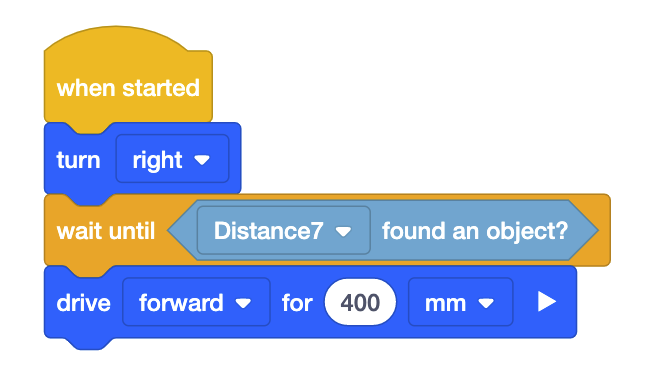
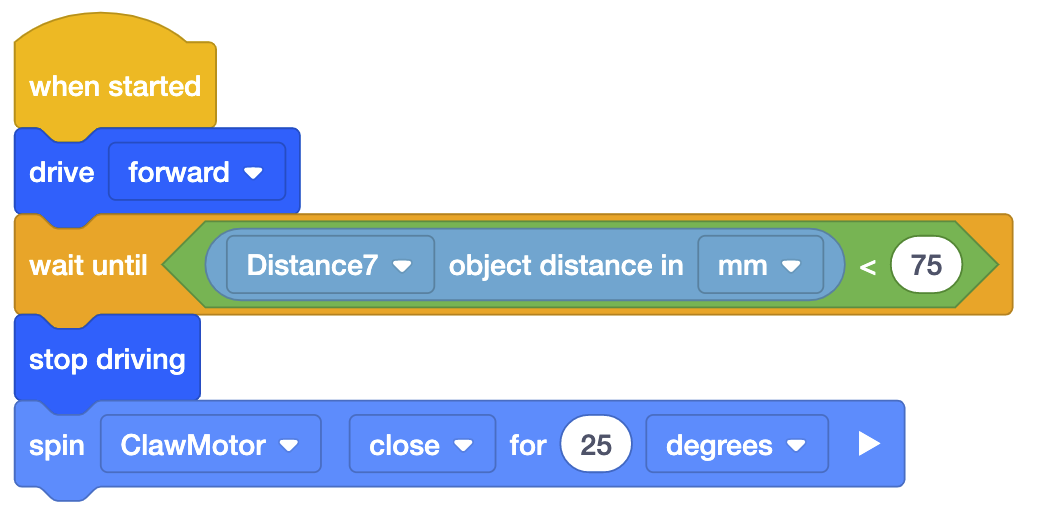
Das am häufigsten bei EXP verwendete Szenario besteht darin, dass der Abstandssensor die Entfernung zu einem anderen Objekt bestimmt. Wie die bei den anderen Sensoren aufgelisteten Beispiele hängt die Nutzung von der Situation und den Wünschen ab. Im ersten Bild fordert der Code den Roboter auf, sich zu drehen, bis er ein Objekt erkennt, und dann 400 mm vorwärts zu fahren, sobald er dies tut. Im zweiten Beispiel schließt der Klauenbot seine Klaue, sobald ein Objekt näher als 75 mm ist. Andere Szenarien beinhalten, dass der Roboter ein Objekt erkennt und dem Objekt entweder ausweicht oder sich ihm nähert, die Entfernung bestimmt, um es zu greifen, die Objektgeschwindigkeit auf dem Gehirn sowie die relative Größe des Objekts sowohl für den Bediener des Roboters berichtet. Die Verwendung einer der Funktionen des Abstandssensors ermöglicht es Ihnen, auf das Geschehene zu reagieren. Die Frage, die folgt, ist, wie möchten und müssen Sie, dass Ihr Roboter reagiert?
Trägheitssensordaten des vex EXP-Gehirns
Die Verwendung der Daten des Trägheitssensors wird in Ihren Code integriert. Verstehen Sie, dass Sie aufgrund des Trägheitssensors die Geschwindigkeit Ihres Roboters reduzieren, den Kurs, die Neigung, das Gieren oder Rollen ändern können. Wenn Sie dem Roboter sagen, dass er rechts abbiegen soll, entweder über den VEXcode oder die Steuerung, wird er aufgefordert, die Richtung entsprechend zu ändern. Mit diesem Sensor können Sie Ihren Roboter im Weltraum bewegen.
Anwendung
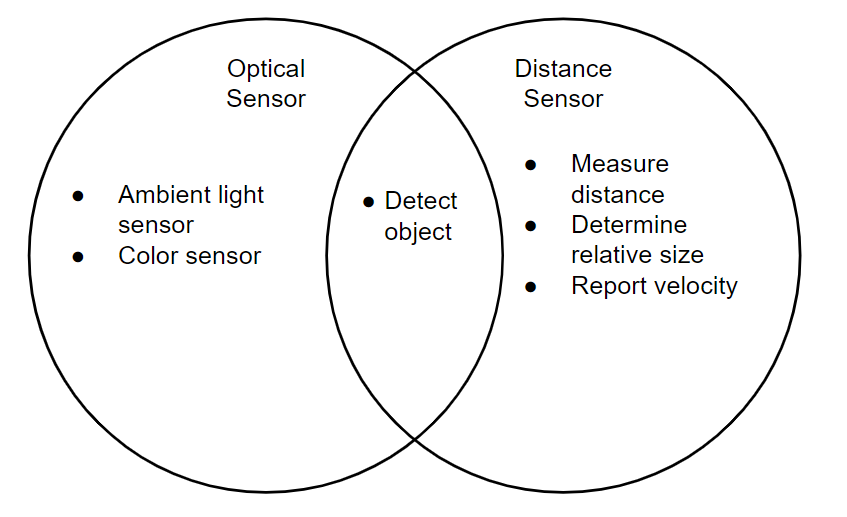
Wenn Sie die oben angegebenen Informationen verwenden und ein Sensor benötigt wird, stellen Sie sicher, dass Sie ihn an der optimalen Stelle auf Ihrem Gebäude gemäß seiner Verwendung platzieren. Sind Sie sich immer noch nicht sicher? Versetzen Sie sich in die Lage des Roboters. Wo ist der optimale Ort für Ihre Augen? Was ist mit Berührung? Wenn es darum geht, welchen Sensor Sie verwenden sollten, gibt es keine richtige Antwort. Sie sollten darauf aufbauen, was Sie tun müssen und welcher Sensor diese Aufgabe erfüllen kann. Siehe das Venn-Diagramm unten. Wenn Sie einen Sensor verwenden möchten, um ein Objekt zu erkennen, können Sie entweder den Abstandssensor oder den optischen Sensor verwenden. Verstehen Sie, dass jeder Sensor seine eigenen Fähigkeiten hat, und wählen Sie dann den aus, der Ihre Anforderungen erfüllt.
Denken Sie daran, dass EXP auch das Klassenzimmer-Äquivalent von V5 ist. V5-Sensoren sind sowohl mit dem EXP Brain als auch mit dem Code abwärtskompatibel und werden sogar in den Code implementiert. Möchtest du mit deinem EXP-Kit mehr spüren? Versuchen Sie, die Sensoren von V5 zu verwenden.