


Analisi e applicazione dei dati del sensore EXP
Panoramica
I sensori nel sistema EXP fanno esattamente come suggerisce il loro nome; percepiscono le cose. Senza questi sensori, la tua build ha un soffitto ipotetico sopra la testa con quello che può fare. Significa che dovremmo prendere ogni singolo aspetto relativo al nostro robot in attenta considerazione e metterlo in codice. L'uso dei sensori è strettamente allineato con il detto, pensa in modo più intelligente, non più difficile. La parte difficile quando si tratta di utilizzare i sensori è analizzare e applicare le informazioni pertinenti che forniscono, che questo articolo approfondirà.
Informazione e collocamento
I sensori devono essere montati nella posizione più ottimale rispetto al loro utilizzo. Ad esempio, un interruttore paraurti deve essere posizionato ad un'altezza in cui si scontrerà con un'altra parte, un sensore ottico deve essere posizionato dove incontrerà un oggetto estraneo e un sensore di distanza deve essere posizionato dove c'è una grande quantità di spazio davanti ad esso. Capire dove montare questi sensori in base al loro utilizzo è il primo passo per applicare i dati del sensore EXP. Diamo un'occhiata a questi esempi in modo più approfondito.
Interruttore paraurti
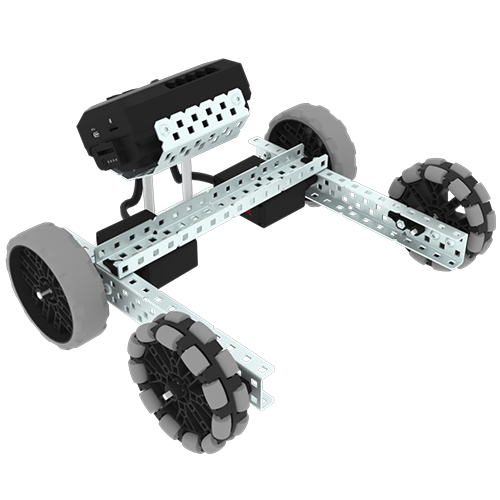
Il VEX Bumper Switch si basa probabilmente sul dispositivo elettrico più comunemente usato: l'interruttore. Un interruttore è costituito da due terminali (posti per collegare un filo) e un ponte di filo per "effettuare" la connessione quando viene premuto l'interruttore, che viene ricevuto dal cervello del robot. Il posizionamento dello switch dipende interamente dallo scenario di utilizzo. Lo scenario più utilizzato con EXP prevede che il paraurti determini se il robot è entrato in contatto con un altro oggetto. Ad esempio, l'interruttore del paraurti potrebbe essere posizionato sul retro del robot (come nell'immagine di esempio seguente) e utilizzato per impedire al robot di guidare quando viene premuto. Questo scenario richiede che l'interruttore del paraurti abbia un percorso chiaro tra la parte anteriore del sensore e qualsiasi oggetto premuto contro il sensore. Assicurarsi che nessuna struttura sul robot sia davanti al pulsante sulla faccia del sensore. Garantire ciò significa ottenere letture accurate quando si preme il pulsante.
Sensore ottico
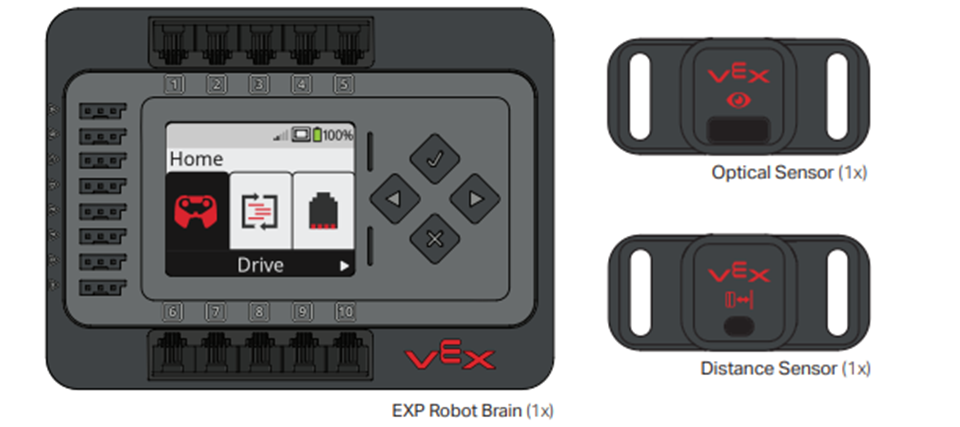
Il sensore ottico è una combinazione del sensore di luce ambientale, del sensore di colore e del sensore di prossimità. Il sensore ottico è in grado di eseguire queste operazioni in quanto riceve energia luminosa e converte l'energia in segnali elettrici. L'elettronica interna del sensore (una macchina a stati hardware) converte questi segnali in segnali di uscita da ricevere come input dal Cervello EXP.
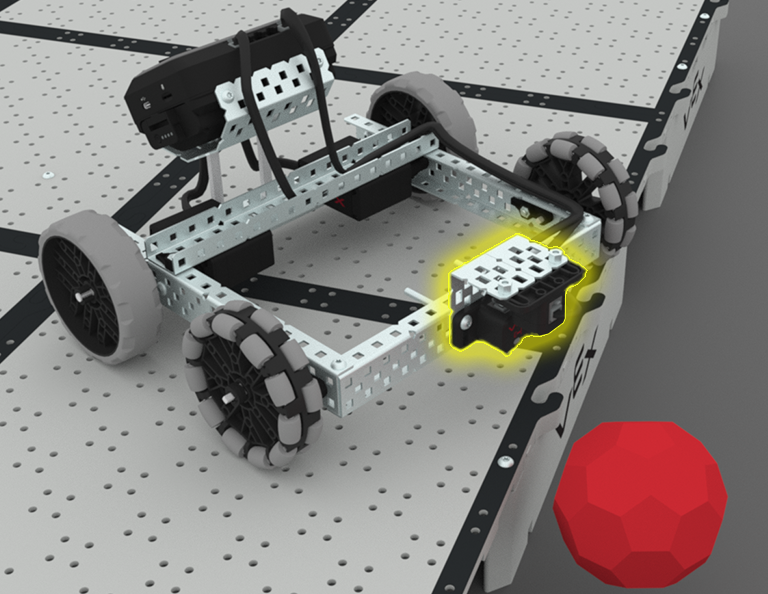
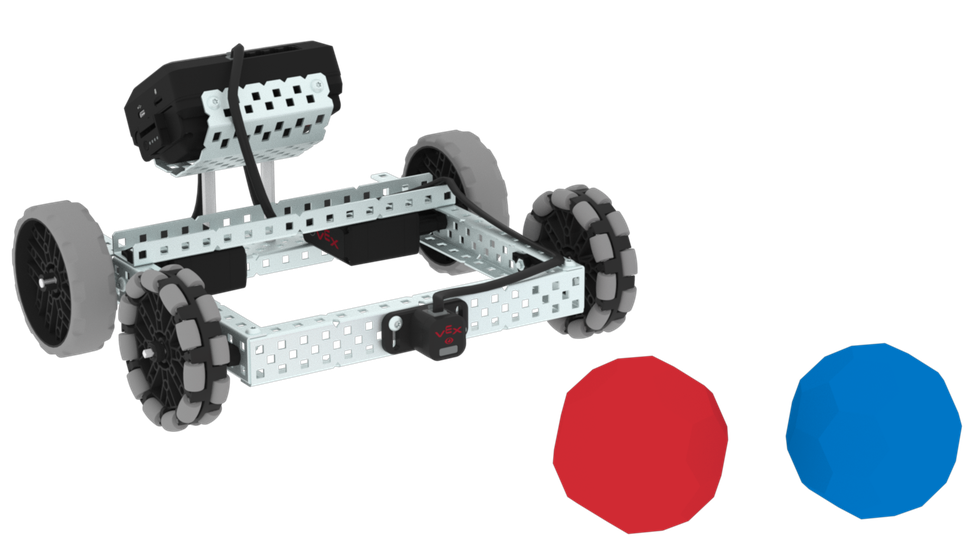
Anche in questo caso, il posizionamento del sensore dipende interamente dallo scenario di utilizzo. Lo scenario più utilizzato con EXP prevede che il Sensore Ottico determini il colore di un altro oggetto. Ad esempio, il sensore ottico può essere montato sulla parte anteriore del BASEBOT EXP e utilizzato per distinguere il colore dei Buckyball (come mostrato nell'immagine a destra). Questo scenario richiede che il sensore ottico abbia un percorso chiaro davanti al sensore tra qualsiasi oggetto misurato e il sensore. Assicurarsi che nessuna struttura sul robot sia davanti alla piccola finestra del sensore ottico sulla faccia del sensore. Garantire ciò significa ottenere letture accurate quando un oggetto viene visualizzato.
Sensore di distanza
Il sensore di distanza ha la capacità di misurare la distanza, rilevare oggetti, determinare la dimensione relativa dell'oggetto e riportare la velocità dell'oggetto. Il sensore di distanza è in grado di eseguire queste operazioni in quanto invia un impulso di un laser di classe 1 e misura la quantità di tempo necessaria affinché l'impulso venga riflesso.
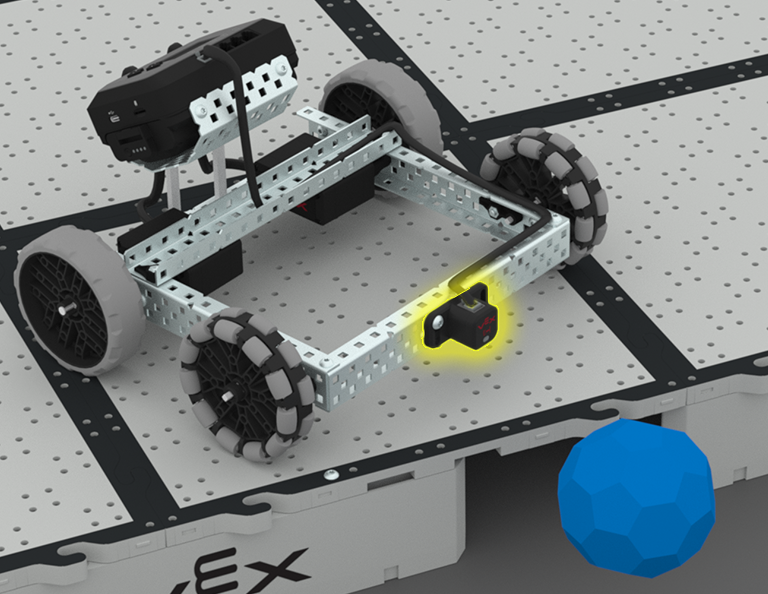
Lo scenario più utilizzato con EXP prevede che il Distance Sensor determini la distanza da un altro oggetto. Ad esempio, il sensore di distanza può essere montato sulla parte anteriore del BaseBot EXP e utilizzato per distinguere la distanza del sensore dai Buckyball. Il BaseBot può essere codificato per guidare verso i Buckyball e spingerli fuori da un campo rialzato (come mostrato nell'immagine seguente). Questo scenario richiede che ci sia un percorso chiaro davanti al sensore tra qualsiasi oggetto misurato e il sensore. Assicurarsi che nessuna struttura sul robot sia davanti alla finestra del piccolo sensore sulla faccia del sensore. Garantire ciò significa ottenere letture accurate quando un oggetto viene visualizzato.
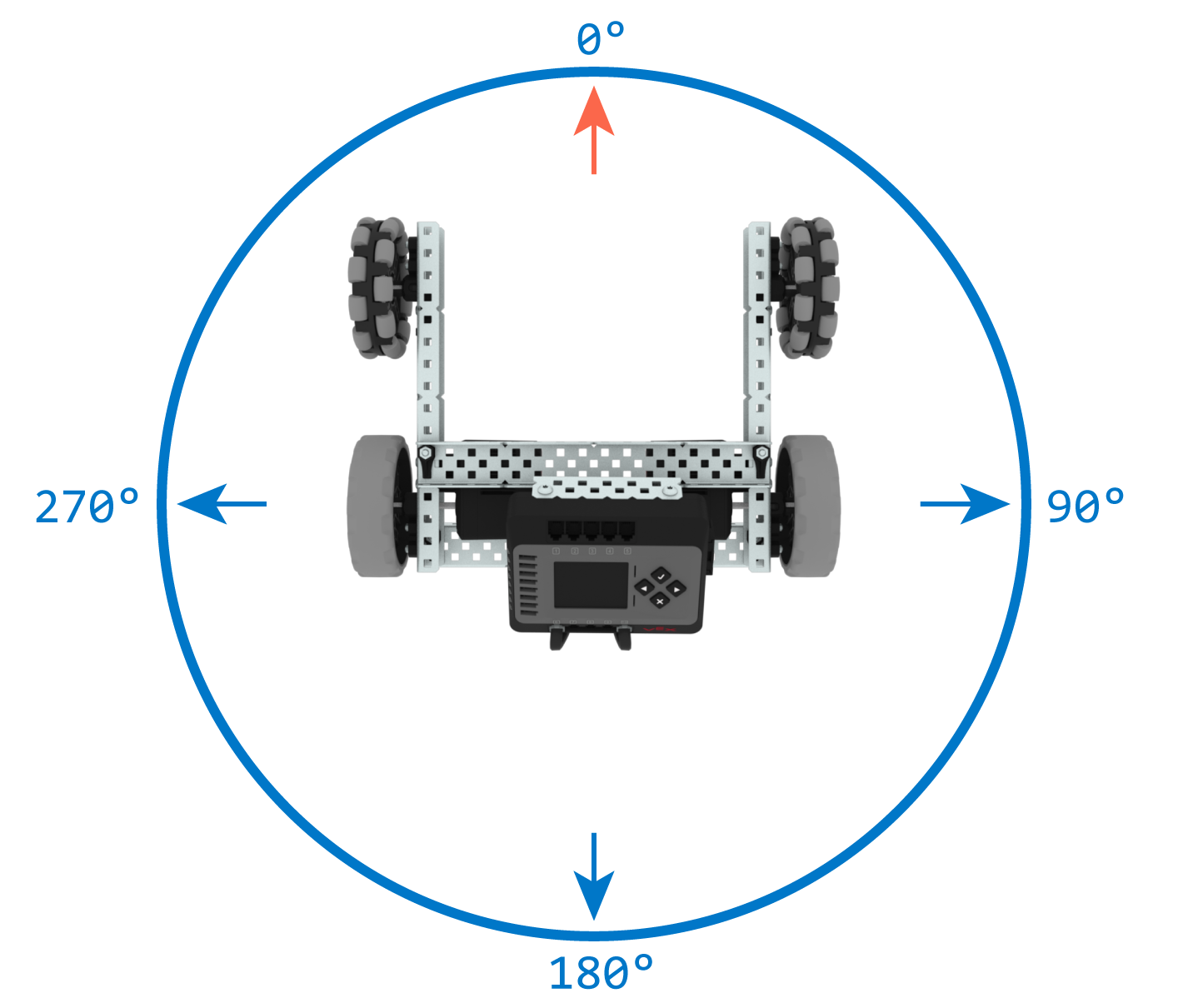
Dati del sensore inerziale dal cervello VEX EXP
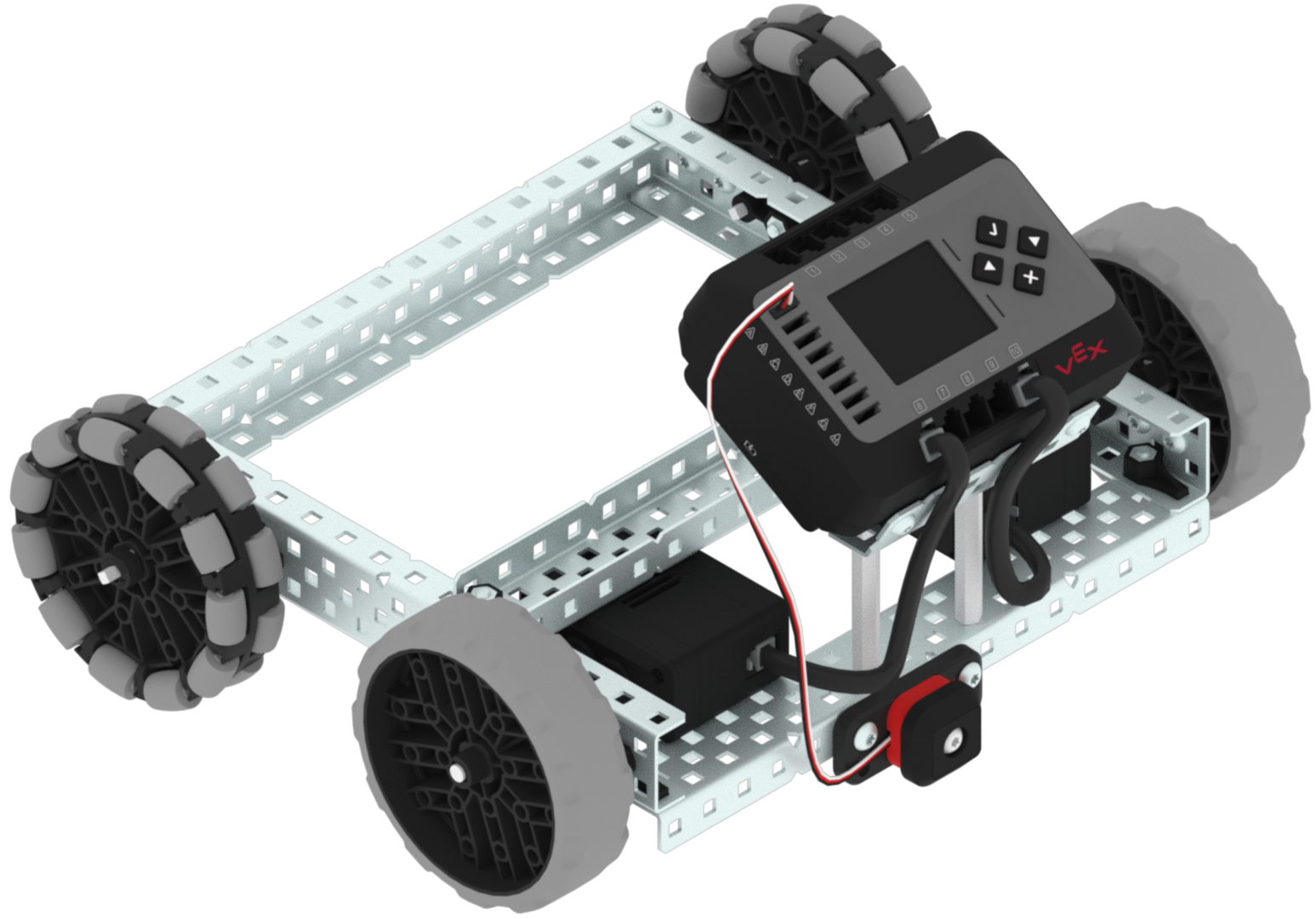
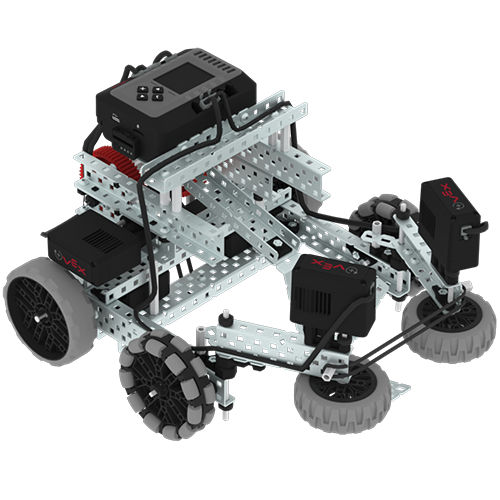
Il VEX EXP Brain ha un sensore inerziale integrato. Il sensore inerziale riporta i dati su direzione, rotazione, orientamento e accelerazione nel cruscotto del sensore e in VEXcode EXP. È importante sapere che quando si monta il cervello, provare a montarlo in modo che la direzione, il beccheggio, il rollio e l'imbardata si allineino con la direzione del robot per semplicità. Questo viene preso in considerazione con BaseBot, Clawbot e CatapultBot (immagine sotto), ma dovrebbe essere considerato con build personalizzate. Se il tuo cervello non è allineato con il tuo robot, i dati che ricevi hanno il potenziale per essere sbagliati.

Utilizzo
È bello pensare a come questi sensori danno vita tecnicamente a queste costruzioni, poiché sono progettati secondo i nostri sensi della vita reale. Pensateci in modo pratico, in quali scenari usereste un certo senso?
Interruttore paraurti
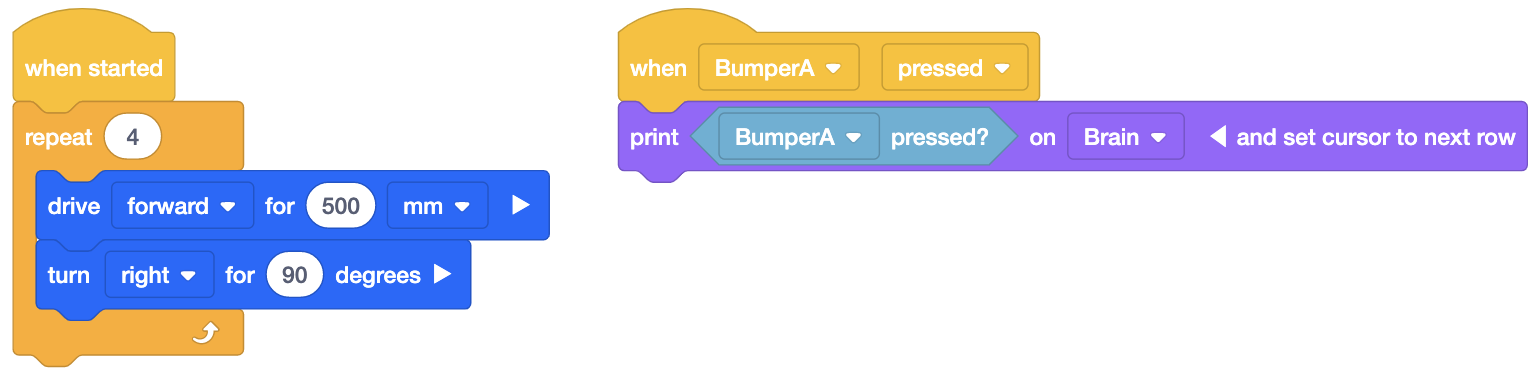
Dopo aver aggiunto il Bumper Switch come dispositivo in VEXcode EXP, ci sono due scenari principali in cui è utile. Questi scenari coinvolgono quando il codice rileva una stampa e gli eventi bumper. Il rilevamento della pressione consente al robot di rilevare quando qualcosa preme sull'interruttore del paraurti, mentre gli eventi del paraurti consentono di eseguire un codice specifico quando si rileva qualcosa che preme sull'interruttore del paraurti. Lo scenario più utilizzato con EXP prevede che il paraurti determini se il robot è entrato in contatto con un altro oggetto. Nella prima immagine sottostante, l'utente ha codificato che se l'interruttore del paraurti entra in contatto con qualcosa, il robot smetterà di avanzare. Conoscendo l'uso dell'interruttore paraurti, è possibile codificare il robot per fare qualsiasi cosa dopo che è stato premuto.
Ad esempio, potresti codificarlo per eseguire il backup, girare, smettere di guidare o semplicemente terminare l'intero progetto. Un altro scenario prevede l'interruttore del paraurti posizionato vicino alla parte superiore del robot e lontano dai pezzi strutturali da utilizzare come arresto di emergenza da parte dell'operatore. Analogamente all'esempio precedente, possiamo analizzare i dati e utilizzarli per prendere una decisione. L'esempio con cui corrono nell'immagine a destra è la stampa che l'interruttore del paraurti è stato premuto sul cervello. A quali usi ti viene in mente? Pensaci in questo modo, se sbatti la tua auto contro un muro, qual è la tua reazione? Retromarcia? Smettere di guidare?
Sensore ottico
Il sensore ottico è uno strumento versatile e ha una vasta gamma di usi. Dopo aver aggiunto il sensore ottico come dispositivo in VEXcode EXP, è possibile codificare e utilizzare il sensore ottico per:
- Accendere o spegnere le luci LED bianche del sensore.
- Impostare la percentuale di potenza delle luci LED bianche.
- Rileva un oggetto.
- Rileva un colore.
- Misurare la luminosità percentuale della luce ambientale.
- Misura la tonalità di un colore in gradi.
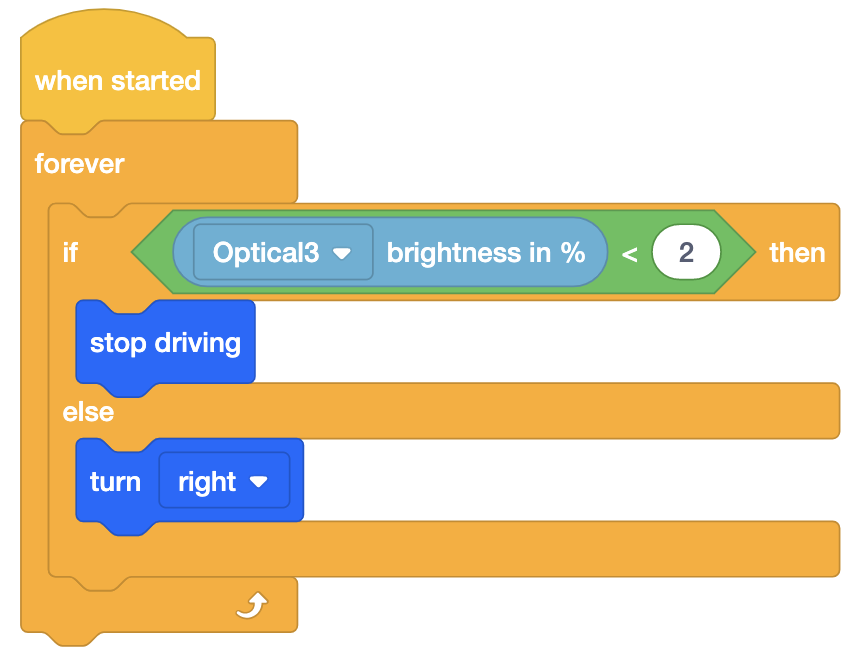
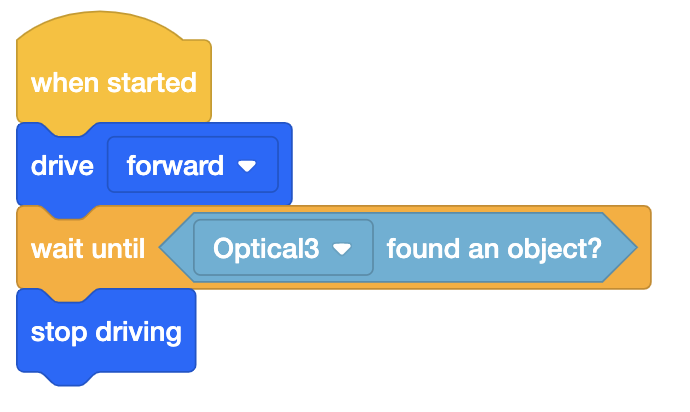
Lo scenario più utilizzato con EXP prevede che il Sensore Ottico determini il colore di un altro oggetto. Successivamente, l'analisi dei dati dipende interamente da ciò per cui si sta utilizzando il sensore. Vuoi che il robot combatta Buckyball di un colore? Evitare un certo colore? Smettere di guidare una volta trovato un colore particolare? Il sensore ottico è un ottimo strumento in quanto è possibile utilizzarlo in qualsiasi modo si possa pensare in relazione alla tonalità o al rilevamento della luce ambientale. Altri scenari includono il robot che smette di guidare quando viene rilevato un oggetto, il robot che smette di guidare quando la luminosità diventa superiore a un certo valore o in qualsiasi altro luogo in cui è richiesto il rilevamento del colore e della luminosità per il robot.
Sensore di distanza
Il sensore di distanza può produrre diverse misurazioni che possono essere utilizzate per modificare il comportamento del robot una volta aggiunto a VEXcode. L'EXP Brain in concerto con un progetto utente può essere utilizzato per convertire le letture del sensore di distanza in:
- Distanza da un oggetto misurata in centimetri, millimetri o pollici.
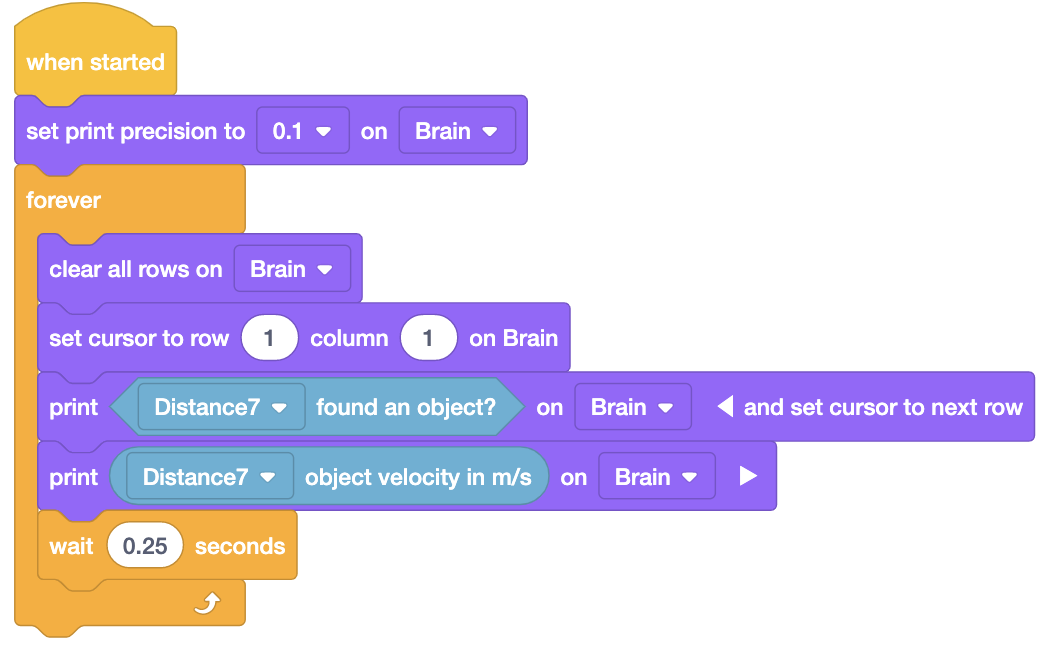
- Velocità dell'oggetto in metri al secondo.
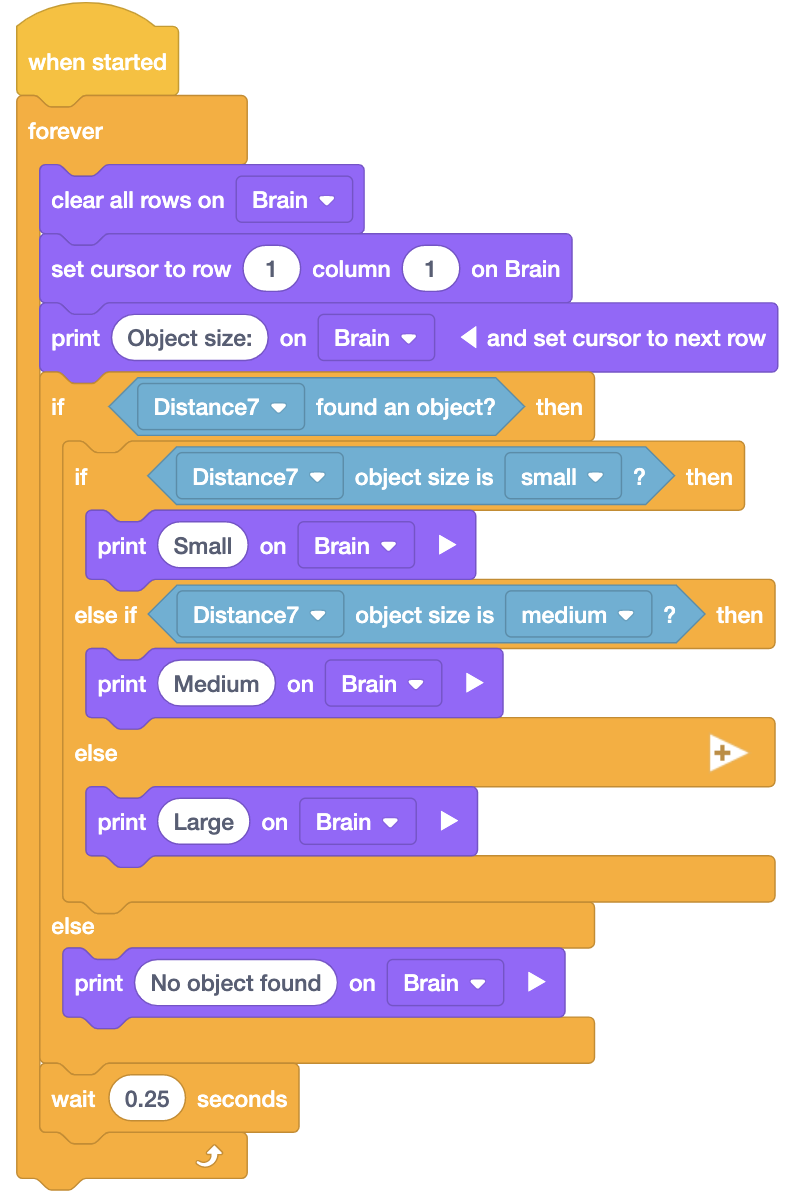
- La dimensione dell'oggetto è piccola, media o grande.
- Oggetto trovato.
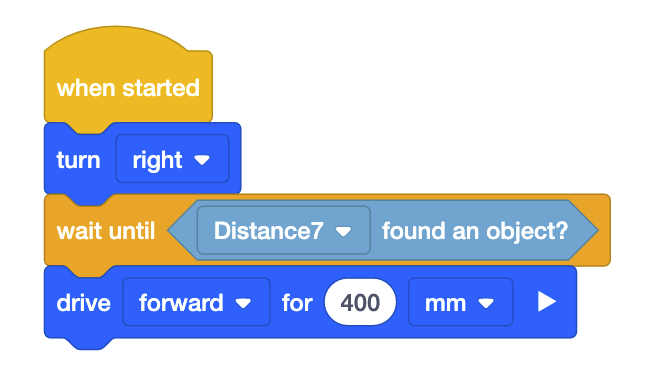
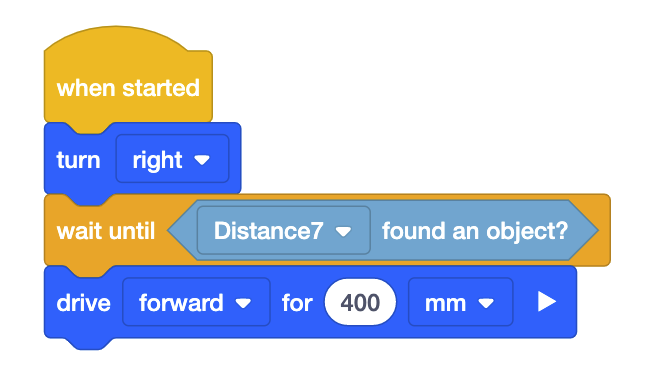
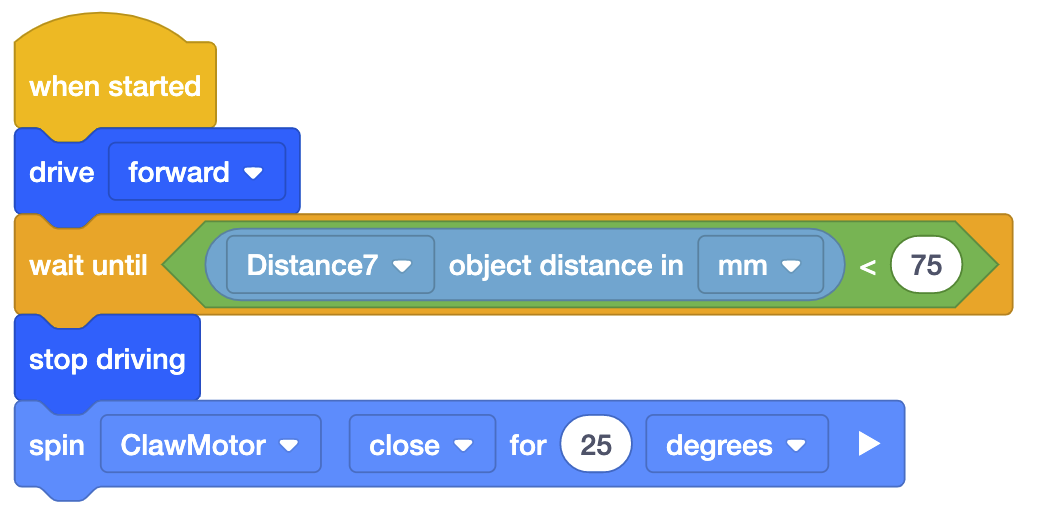
Lo scenario più utilizzato con EXP prevede che il Distance Sensor determini la distanza da un altro oggetto. Come gli esempi elencati con gli altri sensori, l'utilizzo dipende dalla situazione e da ciò che si desidera. Nella prima immagine, il codice richiede al robot di girare fino a quando non rileva un oggetto e poi di avanzare per 400 mm una volta che lo fa. Il secondo esempio vede il Clawbot chiudere il suo artiglio una volta che un oggetto è più vicino di 75 mm. Altri scenari includono il robot che rileva un oggetto e lo evita o si avvicina all'oggetto, determina la distanza per afferrarlo, segnala la velocità dell'oggetto sul cervello e le dimensioni relative dell'oggetto, sia per l'operatore del robot. L'utilizzo di una qualsiasi delle funzioni del sensore di distanza consente di reagire a ciò che sta accadendo. La domanda che segue è come vuoi e hai bisogno che il tuo robot reagisca?
Dati del sensore inerziale dal cervello VEX EXP
L'utilizzo dei dati del sensore inerziale è incorporato nel codice. Comprendi che sei in grado di ridurre la velocità del tuo robot, cambiare direzione, beccheggio, imbardata o rollio a causa del sensore inerziale. Quando si dice al robot di girare a destra, tramite VEXcode o il controller, verrà richiesto al titolo di cambiare di conseguenza. L'utilizzo di questo sensore consente di spostare il robot nello spazio.
Applicazione
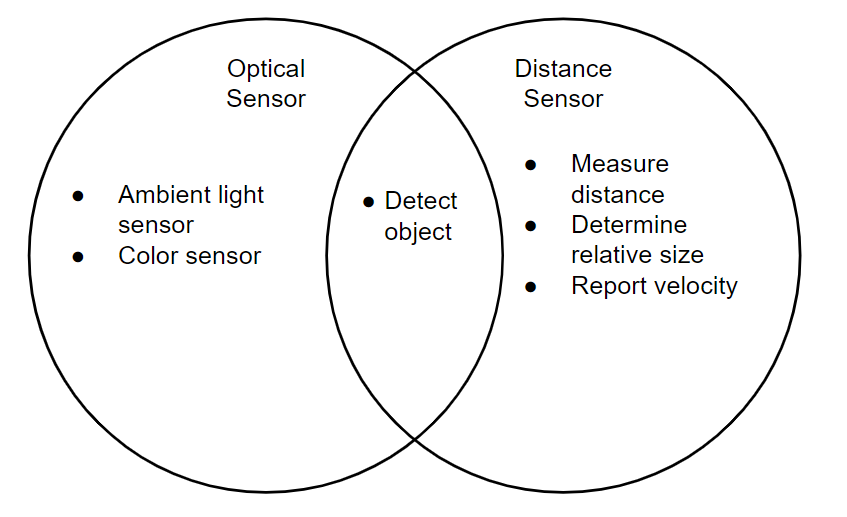
Utilizzando le informazioni fornite sopra, se si verifica una situazione in cui è necessario un sensore, assicurarsi di posizionarlo nella posizione ottimale sulla build per il suo utilizzo. Hai ancora dei dubbi? Mettiti nei panni del robot. Qual è la posizione ottimale per i tuoi occhi? E il tatto? Quando si tratta di quale sensore utilizzare, non esiste una risposta corretta. Dovresti basarti su ciò che devi fare e su quale sensore può svolgere tale compito. Vedere il diagramma di Venn di seguito; se si stava cercando di utilizzare un sensore per rilevare un oggetto, è possibile utilizzare il sensore di distanza o il sensore ottico. Comprendi che ogni sensore ha le sue capacità, quindi scegli quello che soddisferà le tue esigenze.
Ricorda che EXP è anche l'equivalente in classe di V5. I sensori V5 sono retrocompatibili con l'EXP Brain e con il codice e sono persino implementati nel codice. Vuoi percepire di più con il tuo kit EXP? Prova a utilizzare i sensori di V5.