


Analisando e aplicando dados do sensor EXP
Visão geral
Os sensores no sistema EXP fazem exatamente o que o nome sugere; eles sentem as coisas. Sem esses sensores, sua construção tem um teto hipotético acima da cabeça com o que pode fazer. Ou seja, teríamos que considerar cuidadosamente todos os aspectos relativos ao nosso robô e colocá-los em código. O uso de sensores se alinha intimamente com o ditado, pense de forma mais inteligente, não mais difícil. A parte difícil quando se trata de utilizar sensores é analisar e aplicar as informações pertinentes que eles fornecem, sobre as quais este artigo irá elaborar.
Informação e Colocação
Os sensores devem ser montados no local mais ideal em relação ao seu uso. Por exemplo, um interruptor de pára-choques deve ser colocado a uma altura em que colidirá com outra peça, um sensor óptico deve ser colocado onde encontrará um objeto estranho e um sensor de distância deve ser colocado onde há uma grande quantidade de espaço na frente dele. Entender onde montar esses sensores de acordo com o seu uso é o primeiro passo na aplicação dos dados do sensor EXP. Vejamos esses exemplos mais detalhadamente.
Interruptor do para-choques
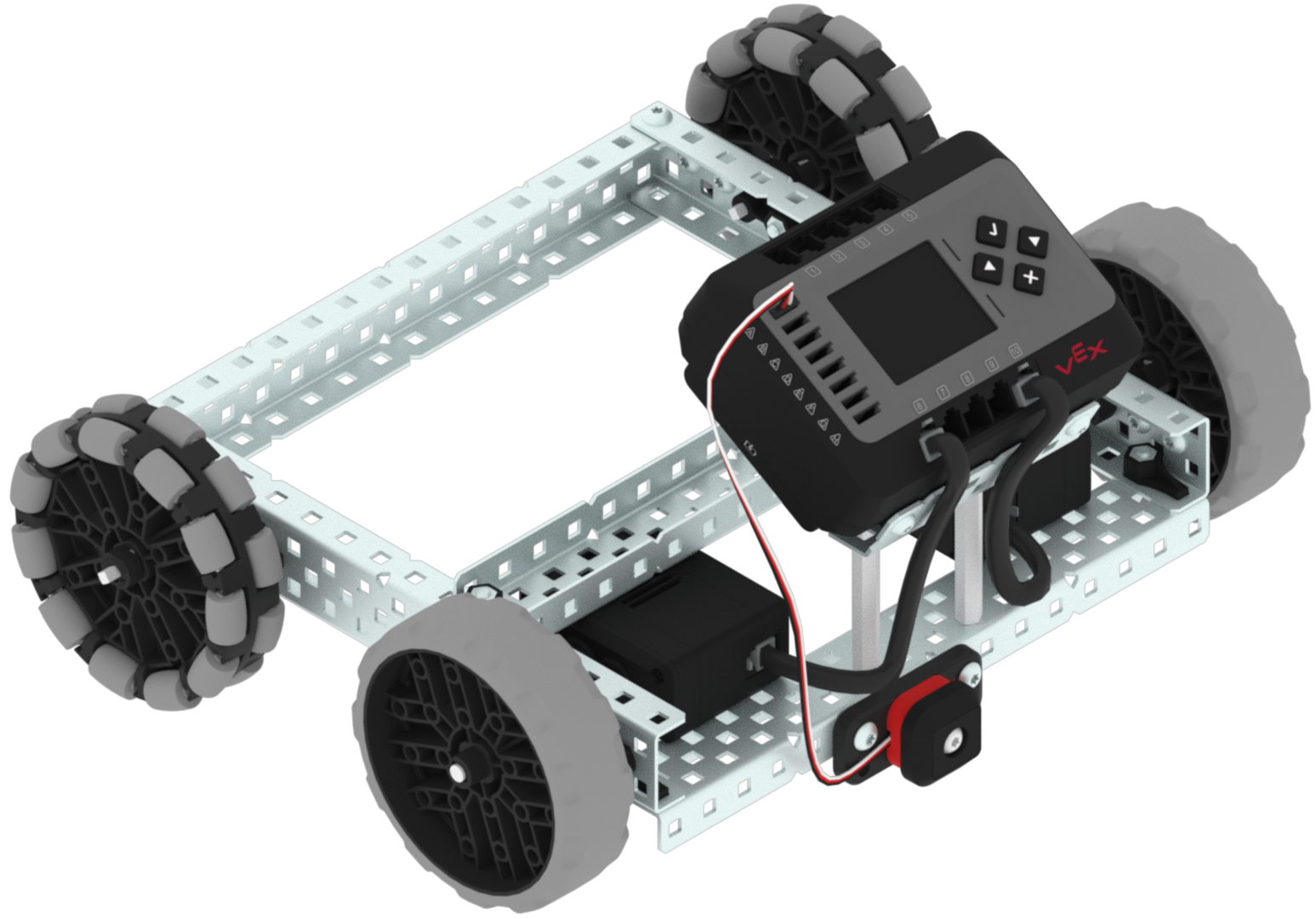
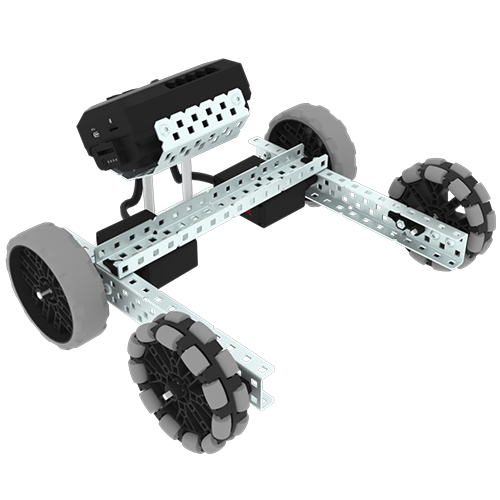
O Interruptor do Para-choques VEX é baseado provavelmente no dispositivo elétrico mais comumente usado: o interruptor. Um interruptor consiste em dois terminais (locais para conectar um fio) e uma ponte de arame para 'fazer' a conexão quando o interruptor é pressionado, que é recebida pelo Cérebro do Robô. A colocação do interruptor depende inteiramente do cenário de uso. O cenário mais utilizado com EXP envolve o pára-choques determinar se o seu robô entrou em contato com outro objeto. Por exemplo, o Interruptor do Para-choques pode ser colocado na parte de trás do robô (como na imagem de exemplo abaixo) e usado para impedir que o robô conduza quando é pressionado. Este cenário requer que o Interruptor do Para-choques tenha um caminho livre entre a frente do sensor e qualquer objeto sendo pressionado contra o sensor. Certifique-se de que nenhuma estrutura do robô esteja na frente do botão na face do sensor. Garantir isso significa que você obterá leituras precisas quando o botão for pressionado.
Sensor óptico
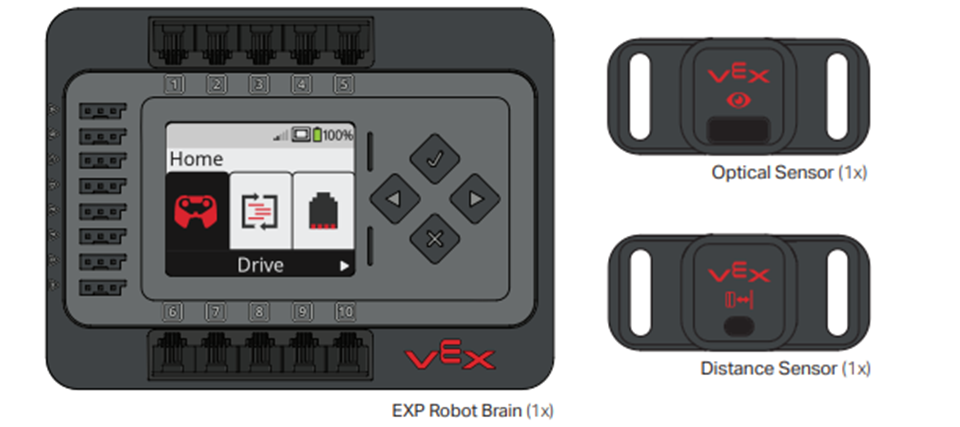
O Sensor Óptico é uma combinação do sensor de luz ambiente, sensor de cor e sensor de proximidade. O Sensor Óptico é capaz de realizar isso, pois recebe energia luminosa e converte a energia em sinais elétricos. A eletrônica interna do sensor (uma máquina de estado de hardware) converte esses sinais em sinais de saída a serem recebidos como uma entrada pelo cérebro EXP.
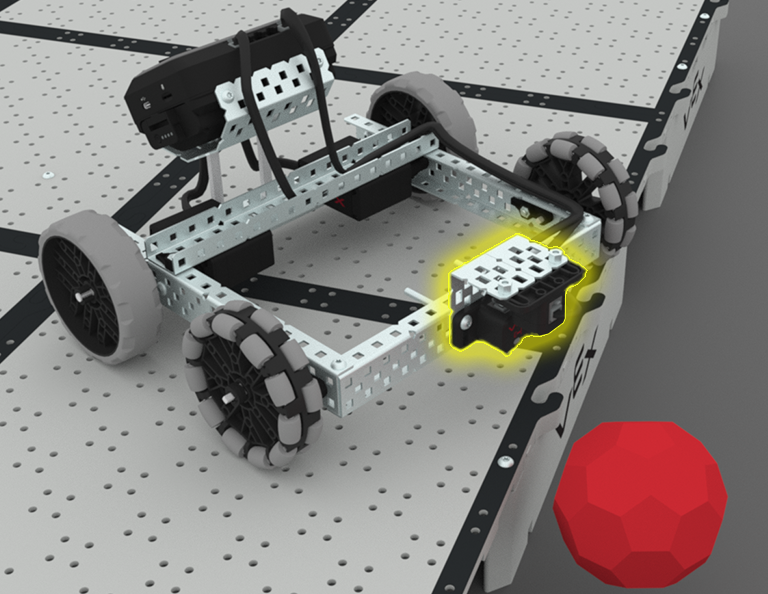
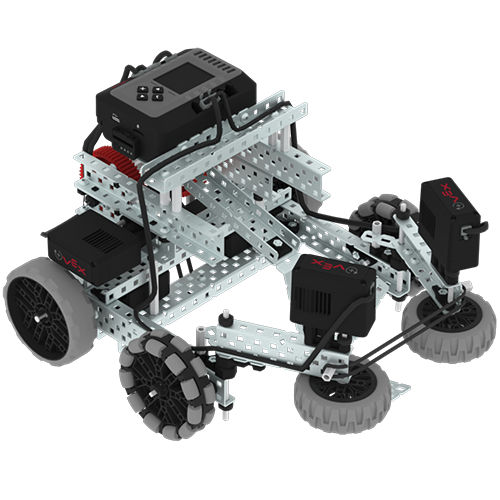
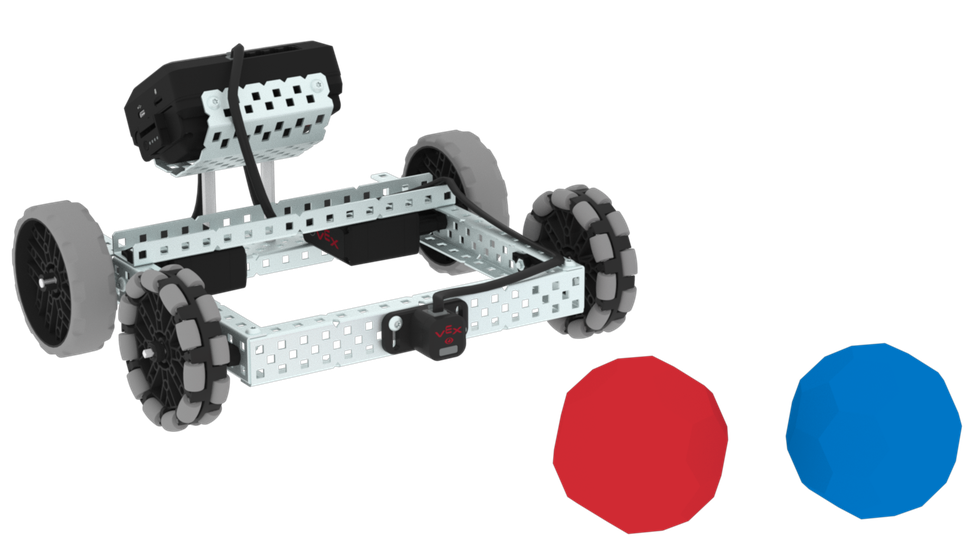
Novamente, a colocação do sensor depende inteiramente do cenário de uso. O cenário mais utilizado com EXP envolve o Sensor Óptico determinando a cor de outro objeto. Por exemplo, o Sensor Óptico pode ser montado na frente do BASEBOT EXP e usado para distinguir a cor dos Buckyballs (como mostrado na imagem à direita). Este cenário requer que o Sensor Óptico tenha um caminho claro na frente do sensor entre qualquer objeto a ser medido e o sensor. Certifique-se de que nenhuma estrutura no robô esteja na frente da pequena janela do sensor óptico na face do sensor. Garantir isto significa que obterá leituras precisas quando um objeto entrar na sua vista.
Sensor de Distância
O Sensor de Distância tem a capacidade de medir a distância, detectar objetos, determinar o tamanho relativo do objeto e relatar a velocidade do objeto. O Sensor de Distância é capaz de fazer isso, pois envia um pulso de um Laser Classe 1 e mede a quantidade de tempo que leva para o pulso ser refletido.
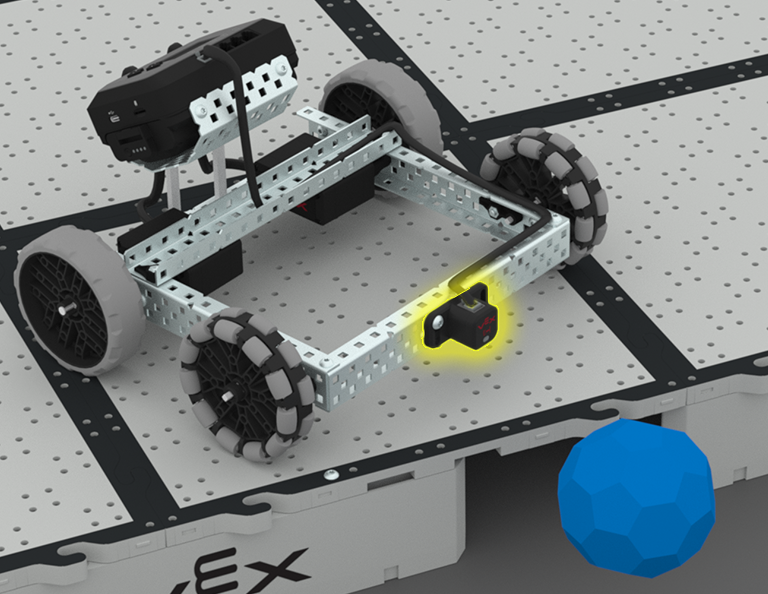
O cenário mais utilizado com EXP envolve o Sensor de Distância determinando a distância para outro objeto. Por exemplo, o Sensor de Distância pode ser montado na frente do BaseBot EXP e usado para distinguir a que distância o sensor está do Buckyballs. O BaseBot pode ser codificado para dirigir em direção a Buckyballs e empurrá-los para fora de um campo elevado (como mostrado na imagem abaixo). Este cenário requer que haja um caminho claro na frente do sensor entre qualquer objeto a ser medido e o sensor. Certifique-se de que nenhuma estrutura no robô esteja na frente da janela do pequeno sensor na face do sensor. Garantir isto significa que obterá leituras precisas quando um objeto entrar na sua vista.
Dados do sensor inercial do cérebro VEX EXP
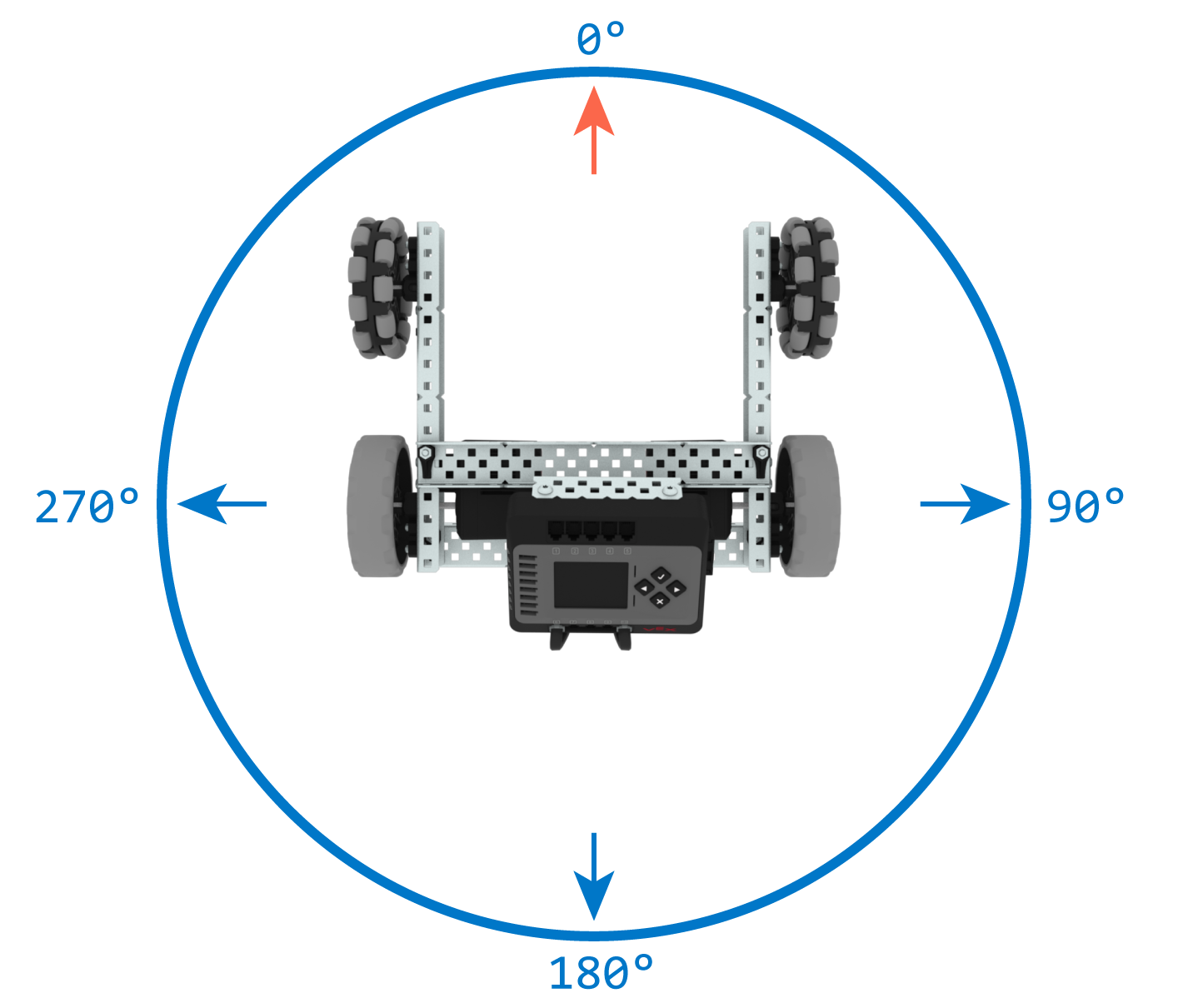
O Cérebro VEX EXP tem um Sensor Inercial embutido. O sensor inercial relata dados sobre rumo, rotação, orientação e aceleração no painel do sensor e no VEXcode EXP. É importante saber que, ao montar o seu Cérebro, tente montá-lo de uma forma em que o cabeçalho, o passo, o rolo e a guinada se alinhem com o cabeçalho do robô para simplificar. Isso é levado em consideração com o BaseBot, Clawbot e CatapultBot (imagem abaixo), mas deve ser considerado com compilações personalizadas. Se o seu cérebro não estiver alinhado com o seu robô, os dados que você recebe podem estar errados.

Uso
É legal pensar em como esses sensores tecnicamente dão vida a essas construções, pois são projetados de acordo com os nossos sentidos da vida real. Pense nisso praticamente, em que cenários você usaria um certo sentido?
Interruptor do para-choques
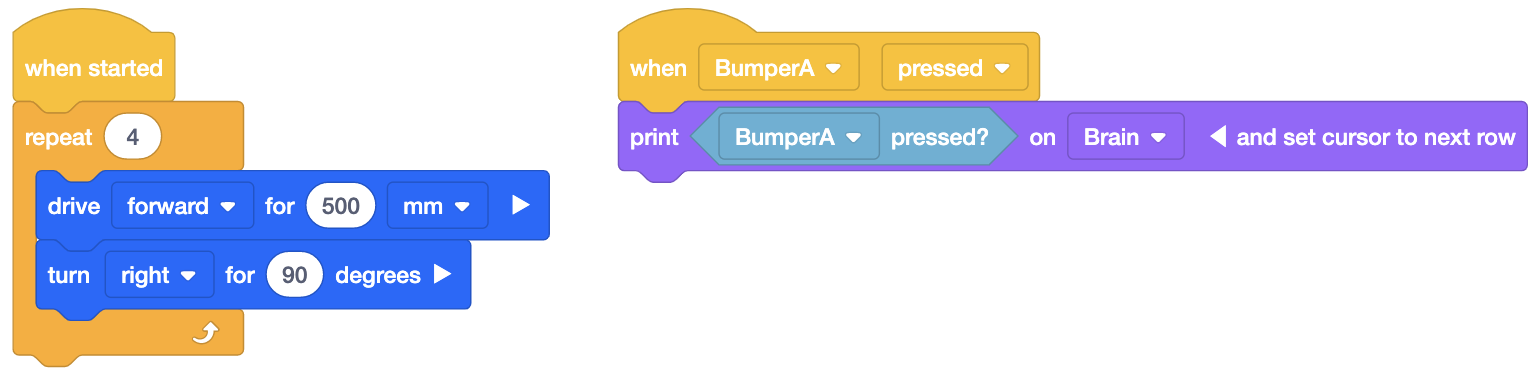
Depois de adicionar o Bumper Switch como um dispositivo no VEXcode EXP, existem dois cenários principais nos quais ele é útil. Esses cenários envolvem quando o código detecta uma pressão e eventos de para-choque. A detecção de pressão permite que o seu robô detecte quando algo pressiona o Interruptor do Para-choque, enquanto os eventos do para-choque permitem que você execute um código específico ao detectar algo pressionando o Interruptor do Para-choque. O cenário mais utilizado com EXP envolve o pára-choques determinar se o seu robô entrou em contato com outro objeto. Na primeira imagem abaixo, o utilizador codificou que, se o Interruptor do Para-choques entrar em contacto com alguma coisa, o robô deixará de avançar. Conhecendo o uso do Interruptor do Para-choques, pode programar o seu robô para fazer qualquer coisa depois de ter sido pressionado.
Por exemplo, você pode codificá-lo para fazer backup, virar, parar de dirigir ou simplesmente encerrar todo o projeto. Outro cenário envolve o Interruptor do Para-choques colocado perto da parte superior do robô e fora do caminho das peças estruturais para ser usado como uma parada de emergência pelo operador. Semelhante ao exemplo anterior, podemos analisar os dados e usá-los para tomar uma decisão. O exemplo com o qual eles são executados na imagem à direita é a impressão de que o Interruptor do Para-choque foi pressionado no cérebro. Em que você consegue pensar? Pense desta forma: se bater o seu carro contra uma parede, qual é a sua reação? Inverter? Parar de conduzir?
Sensor óptico
O Sensor Óptico é uma ferramenta versátil e tem uma variedade de usos. Depois de adicionar o sensor óptico como um dispositivo no VEXcode EXP, você pode codificar e usar o sensor óptico para:
- Ligue ou desligue as luzes LED brancas do sensor.
- Defina a percentagem de energia das luzes LED brancas.
- Detectar um objecto.
- Detecte uma cor.
- Meça a porcentagem de brilho da luz ambiente.
- Meça a tonalidade de uma cor em graus.
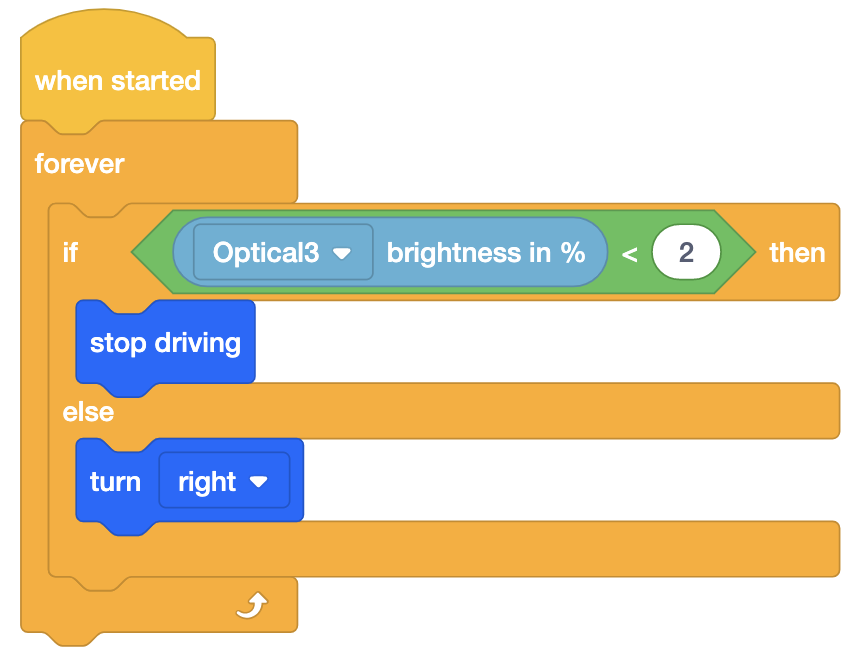
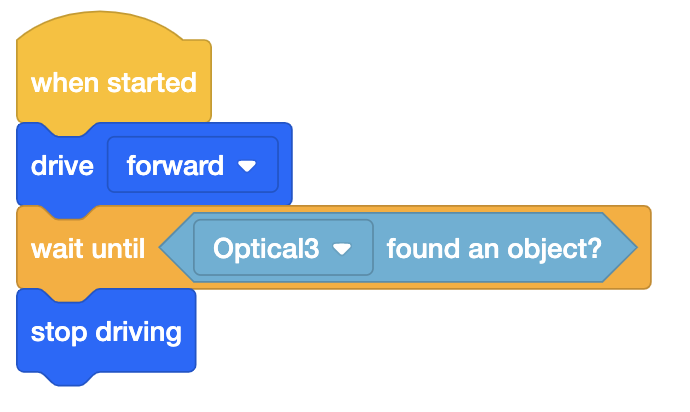
O cenário mais utilizado com EXP envolve o Sensor Óptico determinando a cor de outro objeto. Em seguida, a análise dos dados depende inteiramente do motivo pelo qual você está usando o sensor. Quer que o robô crie Buckyballs de uma cor? Evitar uma determinada cor? Parar de dirigir quando encontrar uma cor específica? O Sensor Óptico é uma ótima ferramenta, pois você pode usá-lo de qualquer maneira que possa pensar relacionada à detecção de matiz ou luz ambiente. Outros cenários incluem o robô parar de dirigir quando um objeto é detectado, o robô parar de dirigir quando o brilho se torna maior do que um determinado valor, ou em qualquer outro lugar onde a detecção de cor e brilho seja necessária para o robô.
Sensor de Distância
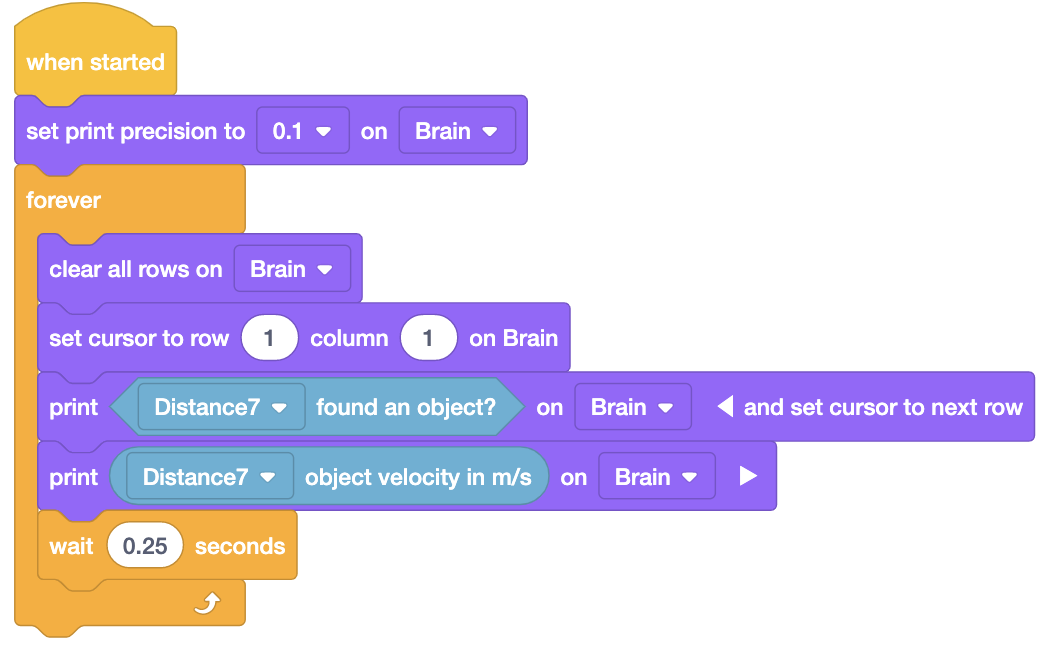
O Sensor de Distância pode produzir várias medições que podem ser usadas para alterar o comportamento do robô uma vez que ele é adicionado ao VEXcode. O EXP Brain em conjunto com um projeto de utilizador pode ser usado para converter as leituras do Sensor de Distância em:
- Distância a um objeto medida em centímetros, milímetros ou polegadas.
- Velocidade do objeto em metros por segundo.
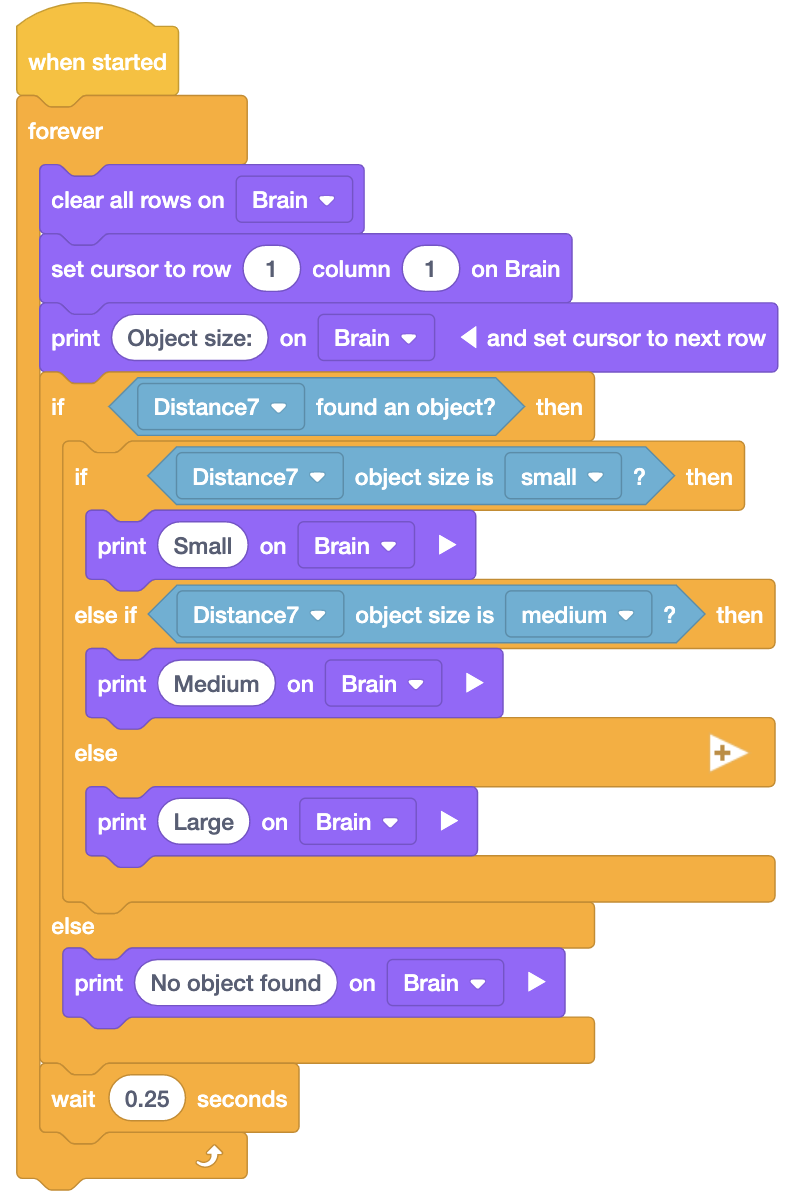
- O tamanho do objeto é pequeno, médio ou grande.
- Objeto encontrado.
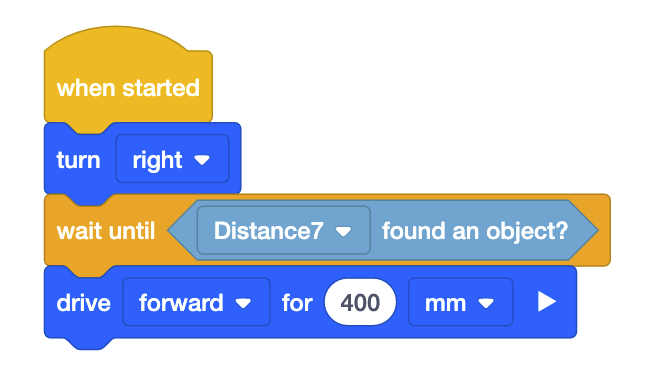
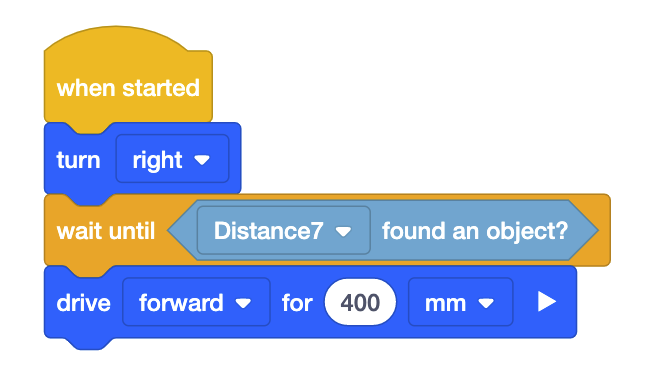
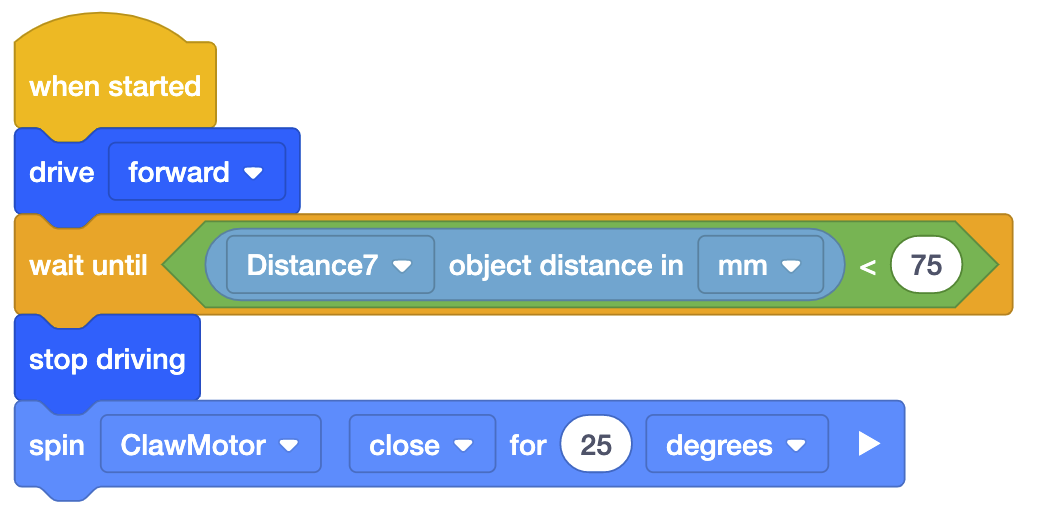
O cenário mais utilizado com EXP envolve o Sensor de Distância determinando a distância para outro objeto. Como os exemplos listados com os outros sensores, o uso depende da situação e do que você deseja. Na primeira imagem, o código pede que o robô gire até detectar um objeto e, em seguida, avance 400 mm. No segundo exemplo, o Clawbot fecha a garra quando um objeto está mais próximo do que 75 mm. Outros cenários incluem o robô detectar um objeto e evitar ou se aproximar do objeto, determinar a distância para agarrá-lo, relatar a velocidade do objeto no cérebro, bem como o tamanho relativo do objeto, tanto para o operador do robô. A utilização de qualquer uma das funções do Sensor de Distância permite que você reaja ao que está acontecendo. A pergunta que se segue é como você quer e precisa que o seu robô reaja?
Dados do sensor inercial do cérebro VEX EXP
O uso dos dados do sensor inercial é incorporado ao seu código. Entenda que você é capaz de reduzir a velocidade do seu robô, mudar de rumo, inclinar, guinar ou rolar por causa do sensor inercial. Quando você diz ao robô para virar à direita, seja através do VEXcode ou do controlador, ele solicitará que o título seja alterado de acordo. A utilização deste sensor permite-lhe mover o seu robô no espaço.
Aplicação
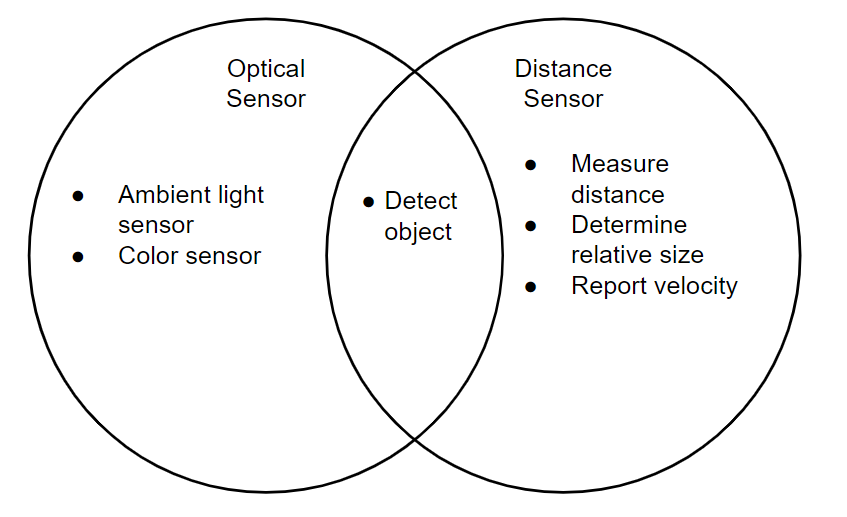
Usando as informações fornecidas acima, caso surja uma situação em que um sensor seja necessário, certifique-se de colocá-lo no local mais ideal em sua construção por seu uso. Ainda não tem certeza? Coloque-se no lugar do robô. Qual é o local ideal para os seus olhos? E o toque? Quando se trata de qual sensor você deve usar, não há uma resposta correta. Você deve baseá-lo no que precisa fazer e em qual sensor pode realizar essa tarefa. Consulte o diagrama de Venn abaixo; se pretender utilizar um sensor para detetar um objeto, pode utilizar o Sensor de Distância ou o Sensor Óptico. Entenda que cada sensor tem suas próprias capacidades e escolha aquele que atenderá às suas necessidades.
Lembre-se de que EXP também é o equivalente em sala de aula de V5. Os sensores V5 são retrocompatíveis com o EXP Brain, bem como com o código, e são até implementados no código. Quer sentir mais com o seu Kit EXP? Tente usar os sensores da V5.