


Análisis y aplicación de los datos del sensor EXP
Descripción general
Los sensores en el sistema EXP hacen exactamente lo que su nombre sugiere; perciben las cosas. Sin estos sensores, su construcción tiene un techo hipotético sobre su cabeza con lo que puede hacer. Es decir, tendríamos que tener en cuenta todos los aspectos relativos a nuestro robot y ponerlo en código. El uso de sensores se alinea estrechamente con el dicho, piensa de manera más inteligente, no más difícil. La parte difícil cuando se trata de utilizar sensores, es analizar y aplicar la información pertinente que proporcionan, que este artículo detallará.
Información y colocación
Los sensores deben montarse en la ubicación más óptima en relación con su uso. Por ejemplo, un interruptor de parachoques debe colocarse a una altura en la que chocará con otra parte, un sensor óptico debe colocarse donde se encontrará con un objeto extraño y un sensor de distancia debe colocarse donde haya una gran cantidad de espacio frente a él. Comprender dónde montar estos sensores de acuerdo con su uso es el primer paso para aplicar los datos del sensor EXP. Veamos estos ejemplos más en profundidad.
Interruptor de parachoques
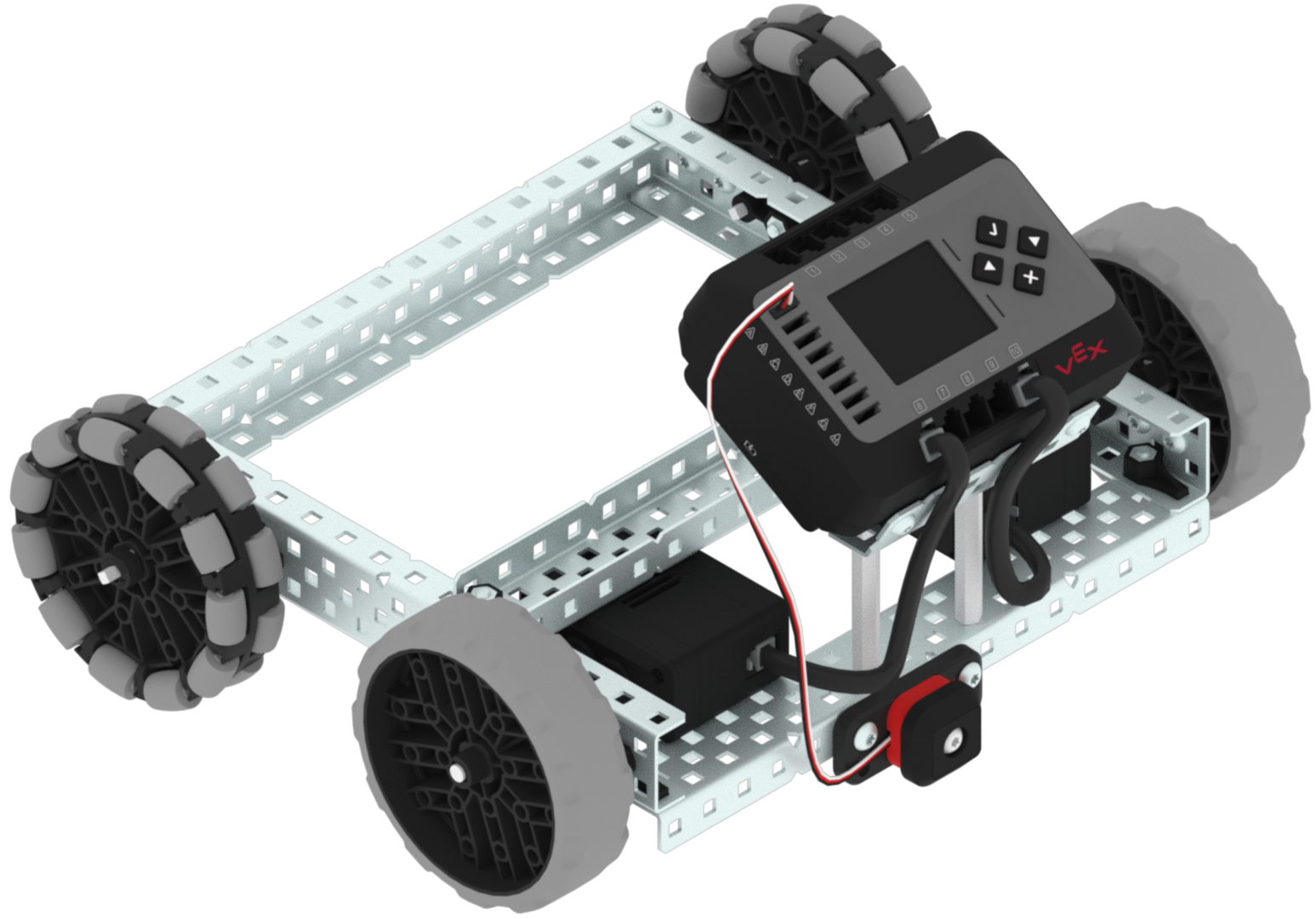
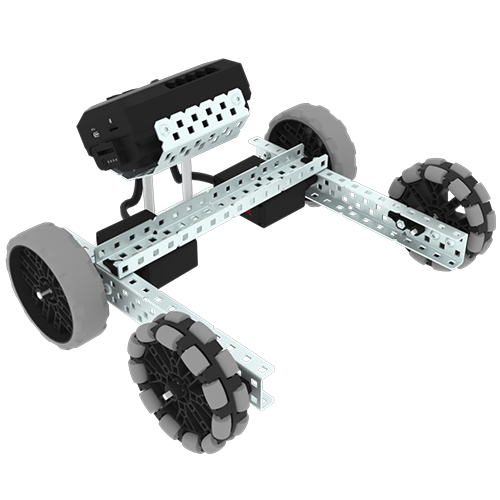
El interruptor de parachoques VEX se basa probablemente en el dispositivo eléctrico más utilizado: el interruptor. Un interruptor consta de dos terminales (lugares para conectar un cable) y un puente de cable para "hacer" la conexión cuando se presiona el interruptor, que es recibido por el cerebro del robot. La colocación del interruptor depende completamente del escenario de uso. El escenario más utilizado con EXP implica que el parachoques determine si su robot ha entrado en contacto con otro objeto. Por ejemplo, el interruptor de parachoques podría colocarse en la parte posterior del robot (como en la imagen de ejemplo a continuación) y usarse para evitar que el robot se mueva cuando se presiona. Este escenario requiere que el interruptor de parachoques tenga un camino despejado entre la parte frontal del sensor y cualquier objeto que se presione contra el sensor. Asegúrese de que no haya ninguna estructura en el robot delante del botón en la cara del sensor. Asegurarse de esto significa que obtendrá lecturas precisas cuando presione el botón.
Sensor óptico
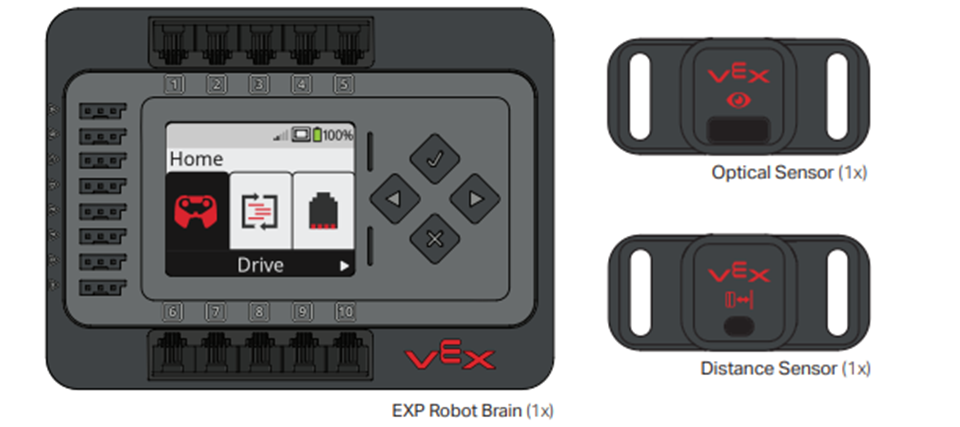
El sensor óptico es una combinación del sensor de luz ambiental, el sensor de color y el sensor de proximidad. El sensor óptico es capaz de lograr esto, ya que recibe energía de la luz y convierte la energía en señales eléctricas. La electrónica interna del sensor (una máquina de estado de hardware) convierte estas señales en señales de salida para ser recibidas como entrada por el cerebro EXP.
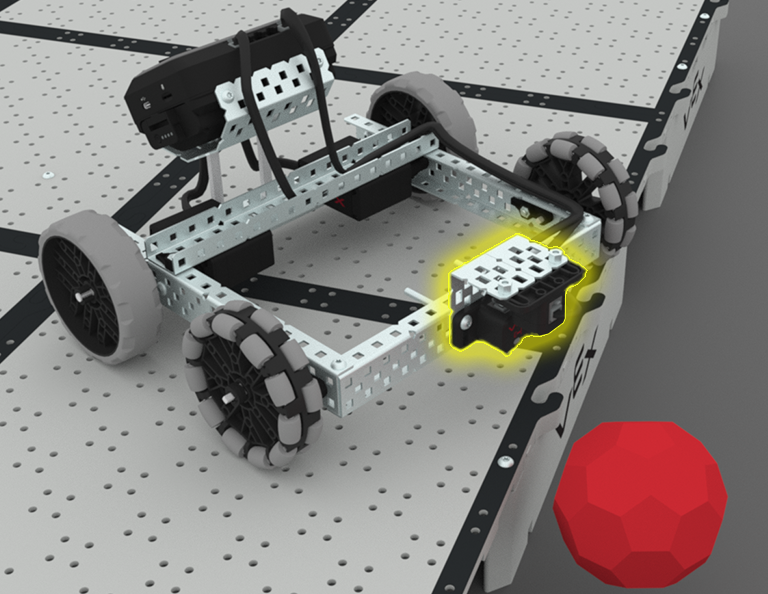
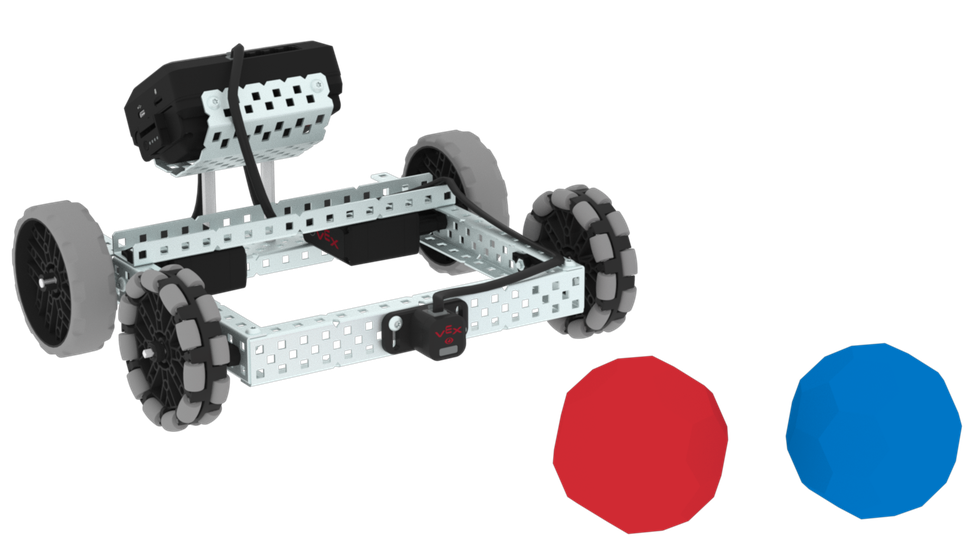
Una vez más, la colocación del sensor depende completamente del escenario de uso. El escenario más utilizado con EXP implica que el sensor óptico determine el color de otro objeto. Por ejemplo, el sensor óptico puede montarse en la parte frontal del EXP BASEBOT y utilizarse para distinguir el color de las buckyballs (como se muestra en la imagen de la derecha). Este escenario requiere que el sensor óptico tenga una trayectoria clara delante del sensor entre cualquier objeto que se esté midiendo y el sensor. Asegúrese de que no haya ninguna estructura en el robot frente a la pequeña ventana del sensor óptico en la cara del sensor. Asegurarse de esto significa que obtendrá lecturas precisas cuando un objeto aparezca a su vista.
Sensor de distancia
El sensor de distancia tiene la capacidad de medir la distancia, detectar objetos, determinar el tamaño relativo del objeto e informar la velocidad del objeto. El sensor de distancia puede lograr esto, ya que envía un pulso de un láser de clase 1 y mide la cantidad de tiempo que tarda en reflejarse el pulso.
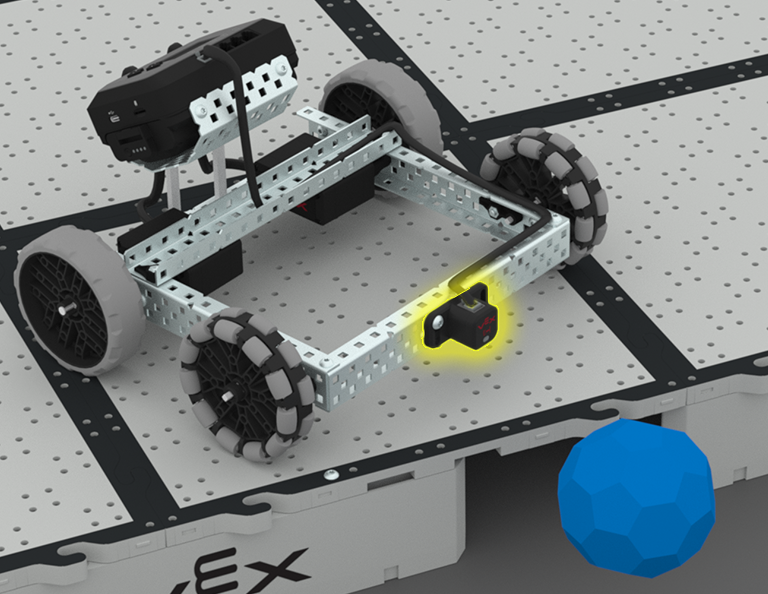
El escenario más utilizado con EXP implica que el sensor de distancia determine la distancia a otro objeto. Por ejemplo, el sensor de distancia se puede montar en la parte delantera del EXP BASEBOT y usarse para distinguir qué tan lejos está el sensor de las Buckyballs. El BaseBot puede codificarse para conducir hacia las Buckyballs y empujarlas fuera de un Campo elevado (como se muestra en la imagen a continuación). Este escenario requiere que haya un camino claro delante del sensor entre cualquier objeto que se esté midiendo y el sensor. Asegúrese de que no haya ninguna estructura en el robot frente a la pequeña ventana del sensor en la cara del sensor. Asegurarse de esto significa que obtendrá lecturas precisas cuando un objeto aparezca a su vista.
Datos del sensor inercial del cerebro VEX EXP
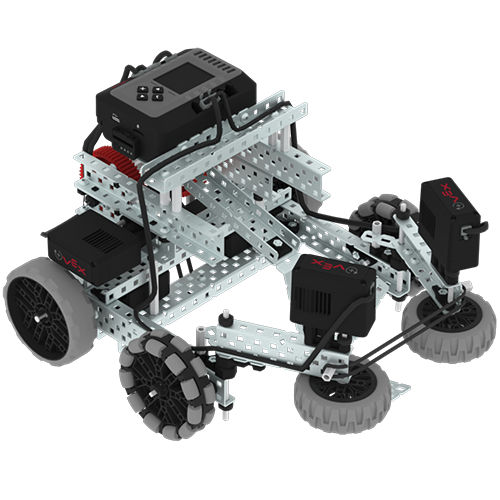
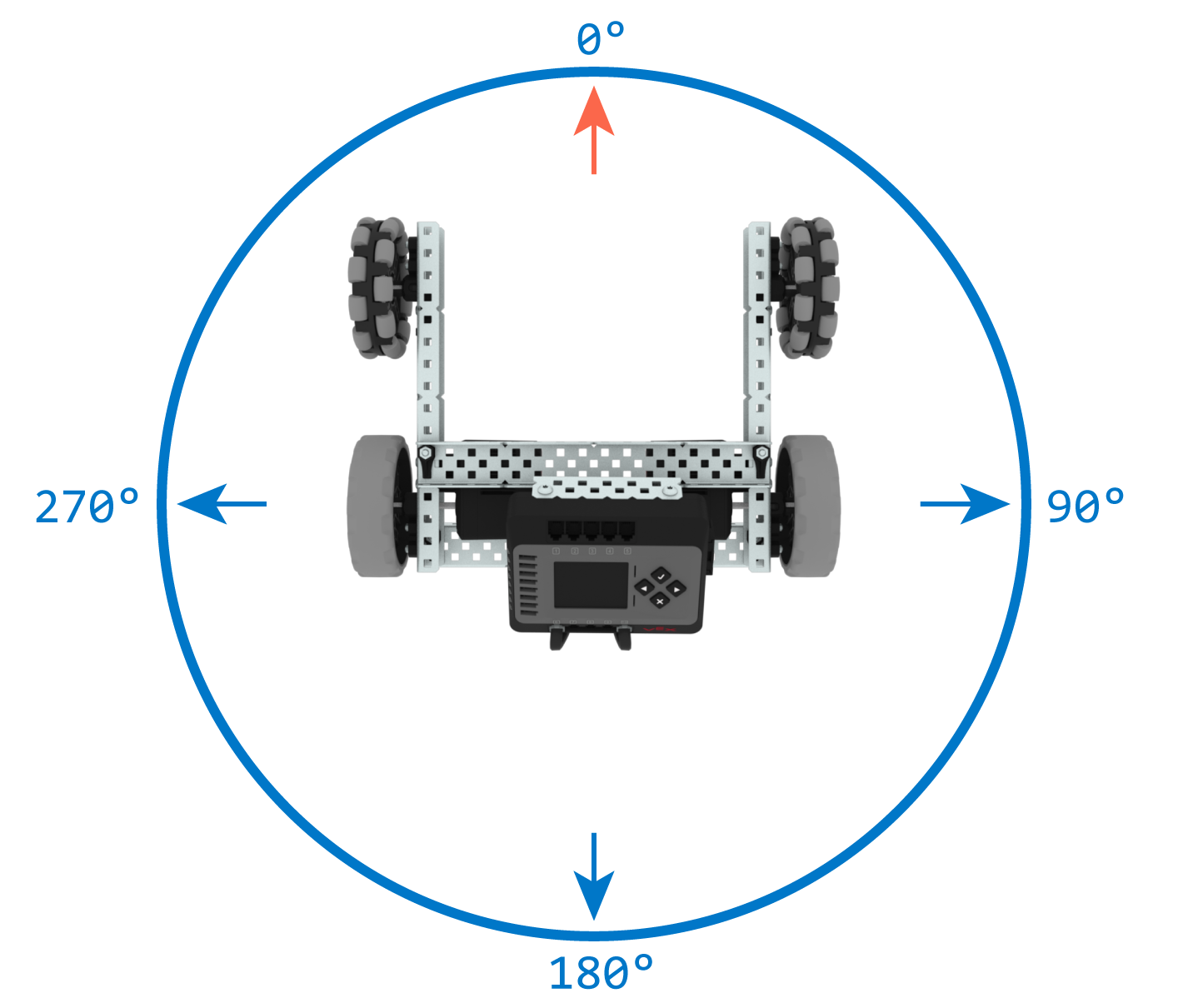
El cerebro VEX EXP tiene un sensor inercial incorporado. El sensor inercial informa datos sobre el rumbo, la rotación, la orientación y la aceleración en el panel del sensor y en VEXcode EXP. Es importante saber que al montar su Brain, intente montarlo de una manera en la que el rumbo, cabeceo, balanceo y guiñada se alineen con el rumbo del robot para mayor simplicidad. Esto se tiene en cuenta con BaseBot, Clawbot y CatapultBot (imagen a continuación), pero debe considerarse con las compilaciones personalizadas. Si su cerebro no está alineado con su robot, los datos que recibe tienen el potencial de estar equivocados.

Uso
Es genial pensar en cómo estos sensores técnicamente dan vida a estas construcciones, ya que están diseñados según nuestros sentidos de la vida real. Piénsalo en la práctica, ¿en qué escenarios usarías un cierto sentido?
Interruptor de parachoques
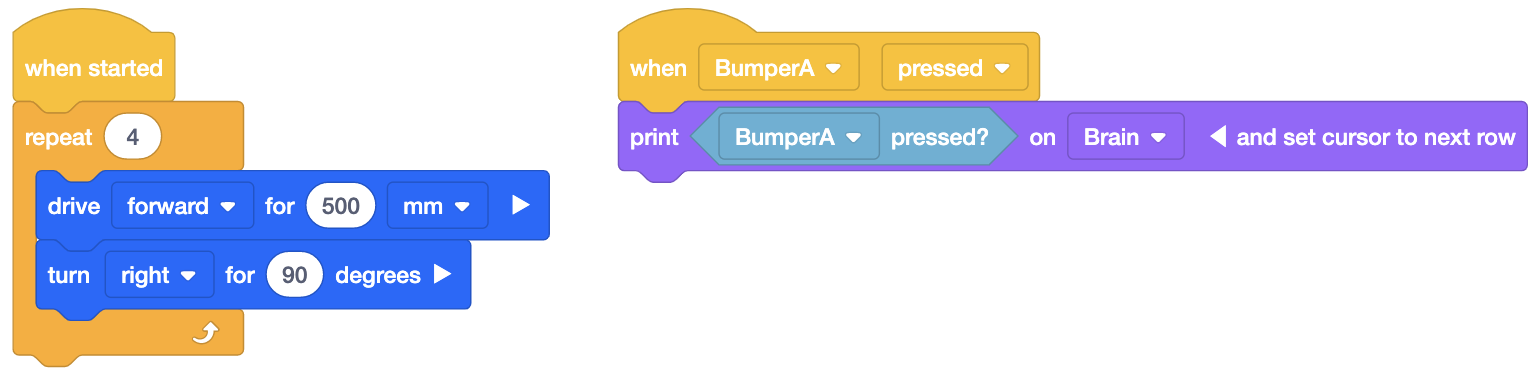
Después de haber añadido el Bumper Switch como dispositivo en VEXcode EXP, hay dos escenarios principales en los que es útil. Estos escenarios implican cuando el código detecta una presión y eventos de choque. La detección de presión permite que su robot detecte cuándo algo presiona el interruptor del parachoques, mientras que los eventos del parachoques le permiten ejecutar un código específico al detectar algo que presiona el interruptor del parachoques. El escenario más utilizado con EXP implica que el parachoques determine si su robot ha entrado en contacto con otro objeto. En la primera imagen a continuación, el usuario ha codificado que si el interruptor del parachoques entra en contacto con algo, el robot dejará de avanzar. Conociendo el uso del interruptor de parachoques, puede codificar su robot para que haga cualquier cosa después de haberlo presionado.
Por ejemplo, podrías codificarlo para retroceder, girar, dejar de conducir o simplemente finalizar todo el proyecto. Otro escenario involucra el interruptor de parachoques colocado cerca de la parte superior del robot, y fuera del camino de las piezas estructurales para ser utilizadas como una parada de emergencia por el operador. Al igual que en el ejemplo anterior, podemos analizar los datos y usarlos para tomar una decisión. El ejemplo con el que corren en la imagen de la derecha es la impresión de que se ha presionado el interruptor del parachoques en el cerebro. ¿Qué usos se te ocurren? Piénsalo de esta manera, si chocas tu coche contra una pared, ¿cuál es tu reacción? ¿Revertir? ¿Dejar de conducir?
Sensor óptico
El sensor óptico es una herramienta versátil y tiene una amplia gama de usos. Después de haber añadido el sensor óptico como dispositivo en VEXcode EXP, puede codificar y utilizar el sensor óptico para:
- Encienda o apague las luces LED blancas del sensor.
- Ajuste el porcentaje de potencia de las luces LED blancas.
- Detectar un objeto.
- Detectar un color.
- Mida el porcentaje de brillo de la luz ambiental.
- Mide el tono de un color en grados.
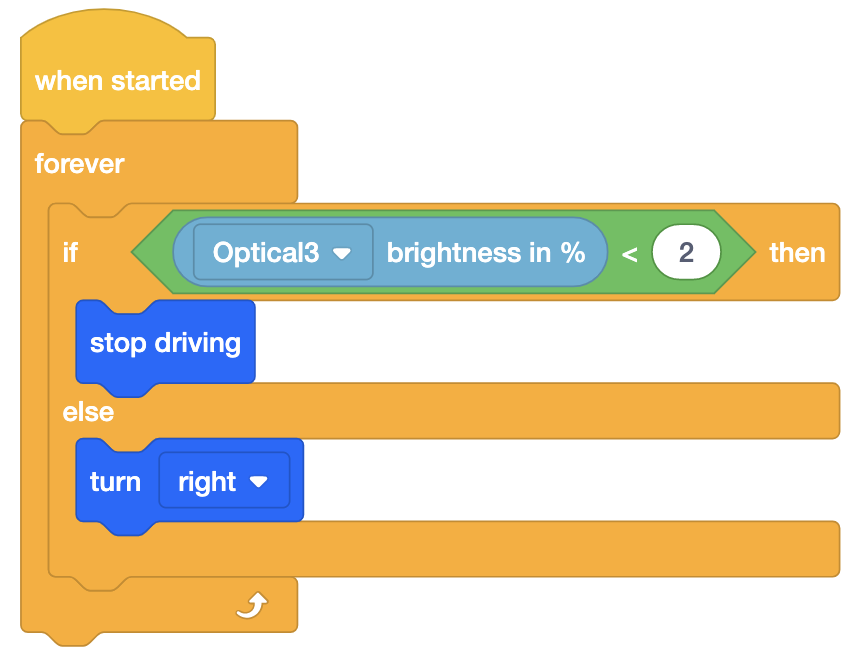
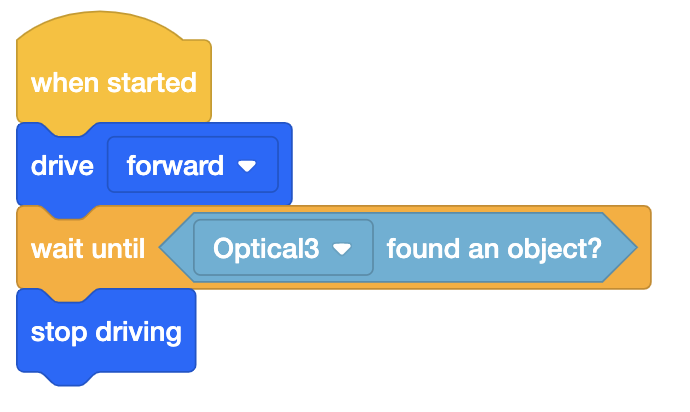
El escenario más utilizado con EXP implica que el sensor óptico determine el color de otro objeto. A continuación, analizar los datos depende completamente de para qué está utilizando el sensor. ¿Quieres que el robot consiga bolas de bucky de un solo color? ¿Evitar un determinado color? ¿Dejar de conducir una vez que encuentre un color en particular? El sensor óptico es una gran herramienta, ya que puede usarlo de cualquier manera que se le ocurra relacionada con el tono o la detección de luz ambiental. Otros escenarios incluyen que el robot deja de conducir cuando se detecta un objeto, el robot deja de conducir cuando el brillo se vuelve mayor que un cierto valor, o en cualquier otro lugar donde se requiera la detección de color y brillo para el robot.
Sensor de distancia
El sensor de distancia puede producir varias mediciones que se pueden utilizar para cambiar el comportamiento del robot una vez que se añade a VEXcode. El EXP Brain en conjunto con un proyecto de usuario se puede utilizar para convertir las lecturas del sensor de distancia en:
- Distancia a un objeto medida en centímetros, milímetros o pulgadas.
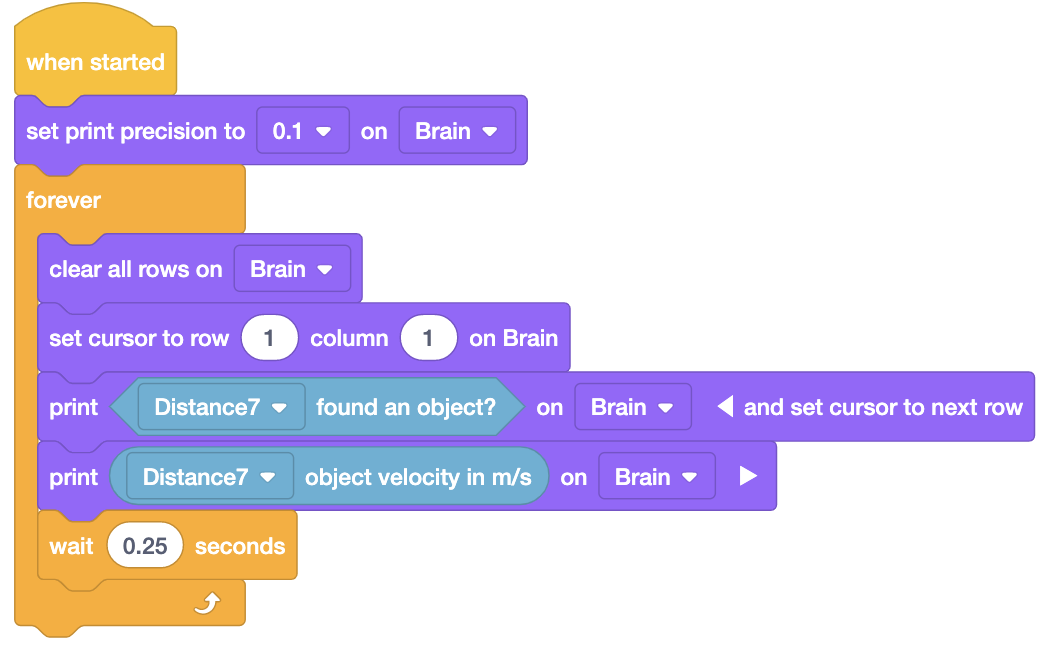
- Velocidad del objeto en metros por segundo.
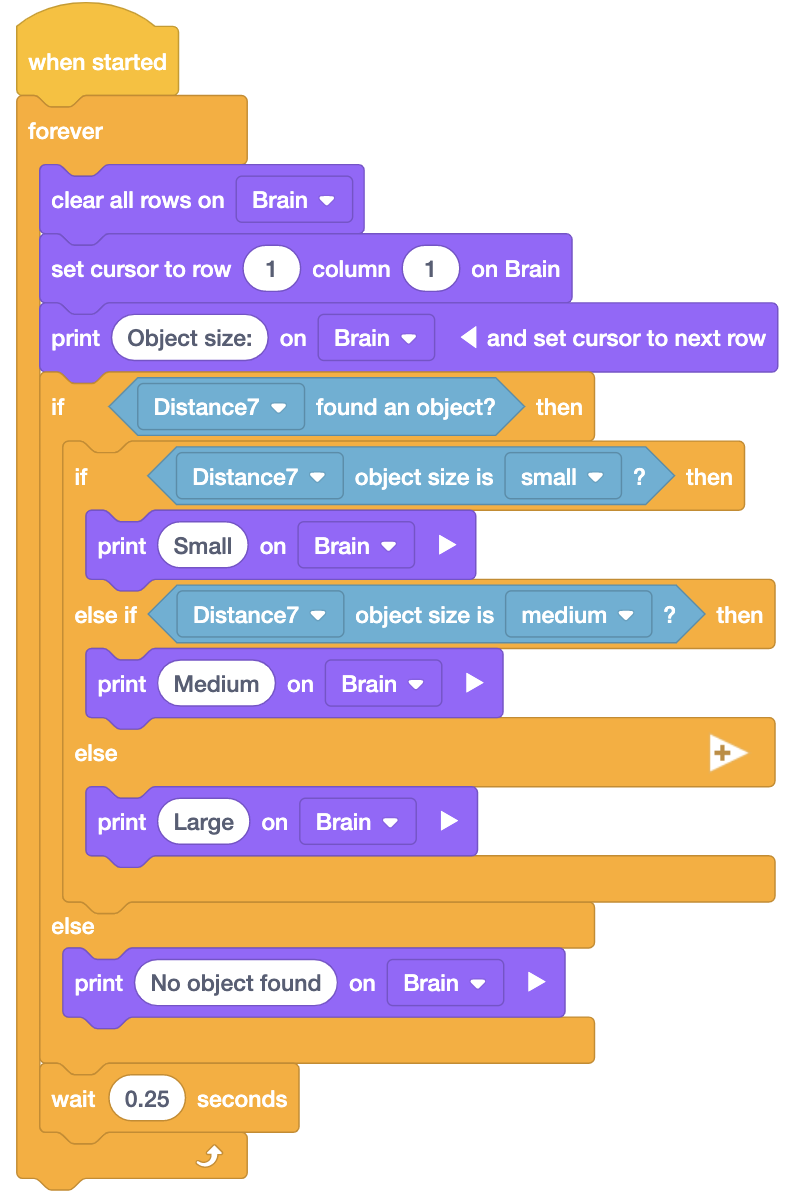
- El tamaño del objeto es pequeño, mediano o grande.
- Objeto encontrado.
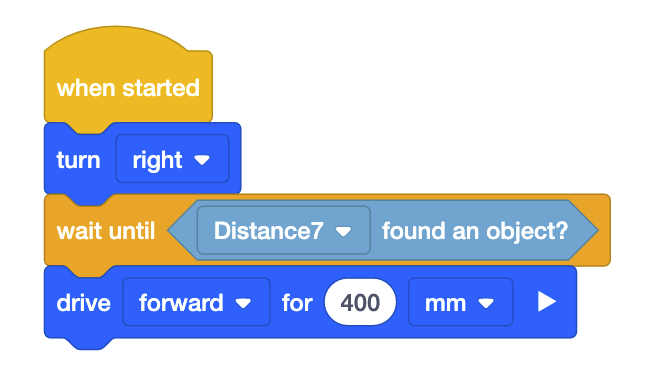
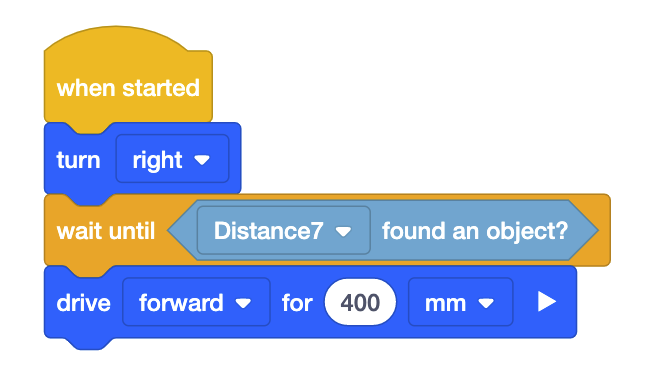
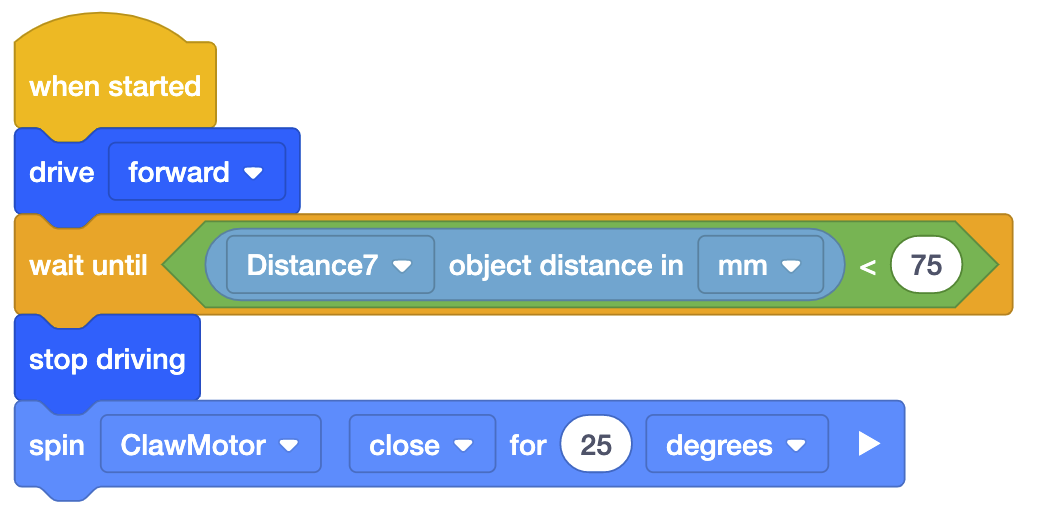
El escenario más utilizado con EXP implica que el sensor de distancia determine la distancia a otro objeto. Al igual que los ejemplos enumerados con los otros sensores, el uso depende de la situación y de lo que desee. En la primera imagen, el código requiere que el robot gire hasta que detecte un objeto y luego avance 400 mm una vez que lo haga. El segundo ejemplo tiene el Clawbot cerrando su garra una vez que un objeto está más cerca de 75 mm. Otros escenarios incluyen que el robot detecte un objeto y evite o se acerque al objeto, determine la distancia para agarrarlo, informe la velocidad del objeto en el cerebro, así como el tamaño relativo del objeto, ambos para el operador del robot. El uso de cualquiera de las funciones del sensor de distancia le permite reaccionar a lo que está sucediendo. La pregunta que sigue es ¿cómo quieres y necesitas que reaccione tu robot?
Datos del sensor inercial del cerebro VEX EXP
El uso de los datos del sensor inercial se incorpora a su código. Comprenda que puede reducir la velocidad de su robot, cambiar de rumbo, cabeceo, guiñada o balanceo debido al sensor inercial. Cuando le diga al robot que gire a la derecha, ya sea a través de VEXcode o del controlador, le pedirá que cambie el rumbo en consecuencia. El uso de este sensor le permite mover su robot en el espacio.
Aplicación
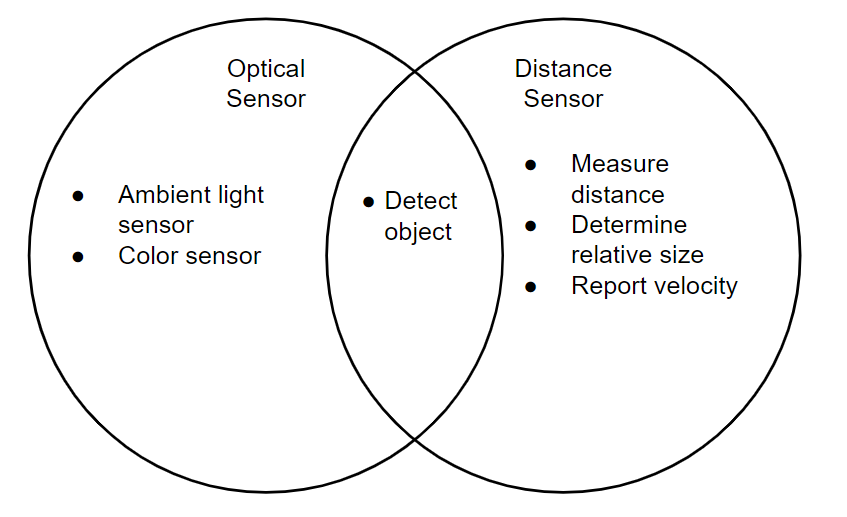
Utilizando la información proporcionada anteriormente, en caso de que surja una situación en la que se necesite un sensor, asegúrese de colocarlo en la ubicación más óptima de su compilación según su uso. ¿Aún no estás seguro? Ponte en los zapatos del robot. ¿Cuál es la ubicación más óptima para tus ojos? ¿Qué pasa con el tacto? Cuando se trata de qué sensor debe usar, no hay una respuesta correcta. Debe basarse en lo que necesita hacer y qué sensor puede realizar esa tarea. Consulte el diagrama de Venn a continuación; si desea utilizar un sensor para detectar un objeto, puede utilizar el sensor de distancia o el sensor óptico. Comprenda que cada sensor tiene sus propias capacidades, luego elija el que satisfaga sus necesidades.
Recuerde que EXP también es el equivalente en el aula de V5. Los sensores V5 son compatibles con el cerebro EXP, así como con el código, e incluso se implementan en el código. ¿Quieres sentir más con tu kit EXP? Intenta usar los sensores de V5.