


Analyse et application des données du capteur EXP
Aperçu
Les capteurs du système EXP font exactement ce que leur nom suggère ; ils sentent les choses. Sans ces capteurs, votre construction a un plafond hypothétique au-dessus de sa tête avec ce qu'elle peut faire. Cela signifie que nous devrions prendre en considération chaque aspect de notre robot et le mettre en code. L'utilisation de capteurs s'aligne étroitement sur le dicton, pensez plus intelligemment, pas plus dur. La partie difficile lorsqu'il s'agit d'utiliser des capteurs, est d'analyser et d'appliquer les informations pertinentes qu'ils fournissent, sur lesquelles cet article s'appuiera.
Information et placement
Les capteurs doivent être montés dans l'emplacement le plus optimal par rapport à leur utilisation. Par exemple, un interrupteur de pare-chocs doit être placé à une hauteur où il entrera en collision avec une autre pièce, un capteur optique doit être placé là où il rencontrera un objet étranger et un capteur de distance doit être placé là où il y a beaucoup d'espace devant lui. Comprendre où monter ces capteurs en fonction de leur utilisation est la première étape dans l'application des données du capteur EXP. Examinons ces exemples plus en détail.
Interrupteur du pare-chocs
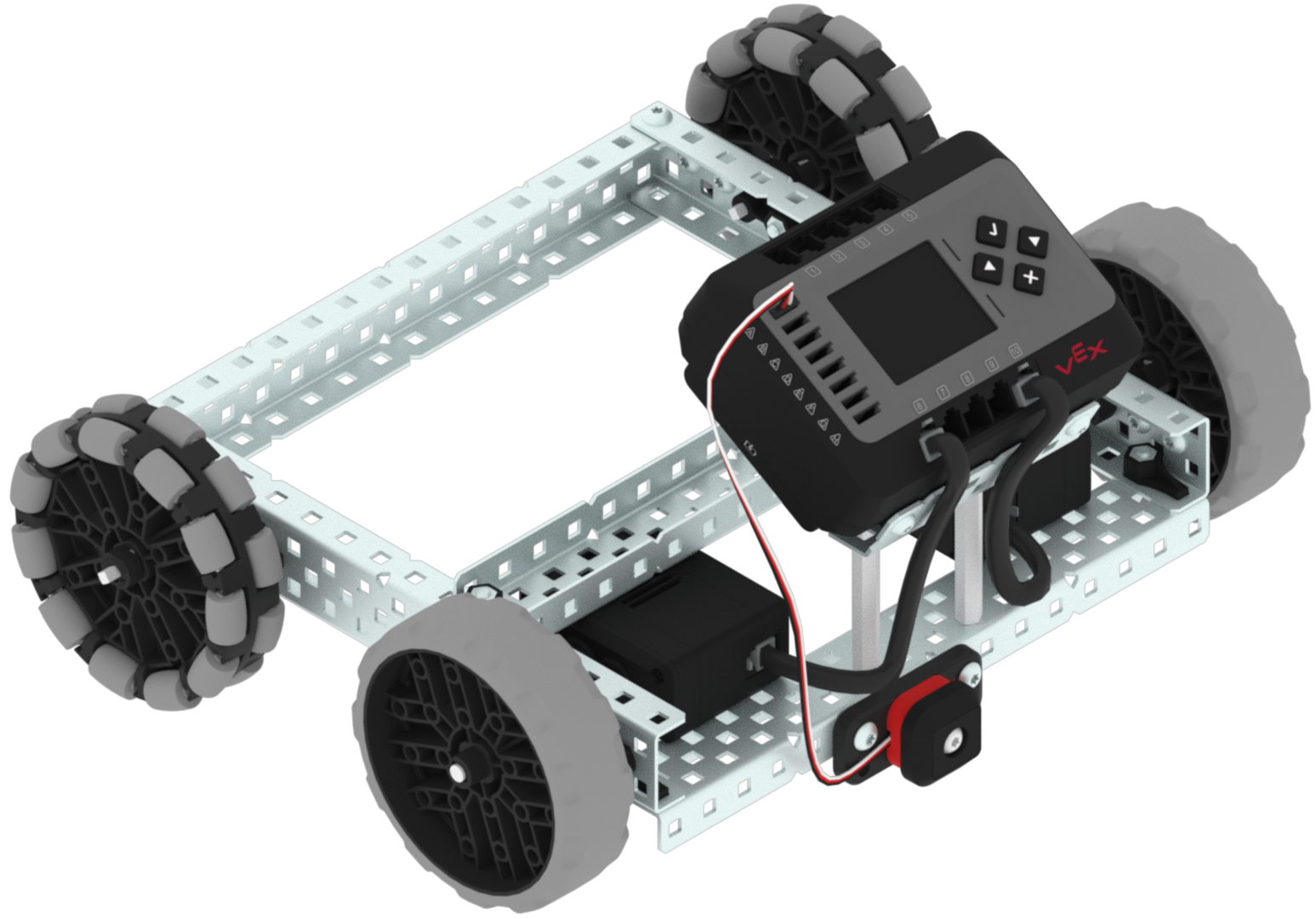
Le commutateur de pare-chocs VEX est basé sur probablement l'appareil électrique le plus couramment utilisé : le commutateur. Un interrupteur se compose de deux bornes (endroits pour attacher un fil) et d'un pont de fils pour « établir » la connexion lorsque l'interrupteur est enfoncé, ce qui est reçu par le cerveau du robot. Le placement du commutateur dépend entièrement du scénario d'utilisation. Le scénario le plus utilisé avec EXP implique que le pare-chocs détermine si votre robot est entré en contact avec un autre objet. Par exemple, l'interrupteur de pare-chocs pourrait être placé à l'arrière du robot (comme dans l'exemple d'image ci-dessous) et utilisé pour empêcher le robot de conduire lorsqu'il est enfoncé. Ce scénario nécessite que l'interrupteur de pare-chocs ait un chemin dégagé entre l'avant du capteur et tout objet pressé contre le capteur. Assurez-vous qu'aucune structure sur le robot n'est en face du bouton sur la face du capteur. En vous assurant que cela signifie que vous obtiendrez des lectures précises lorsque vous appuyez sur votre bouton.
Capteur optique
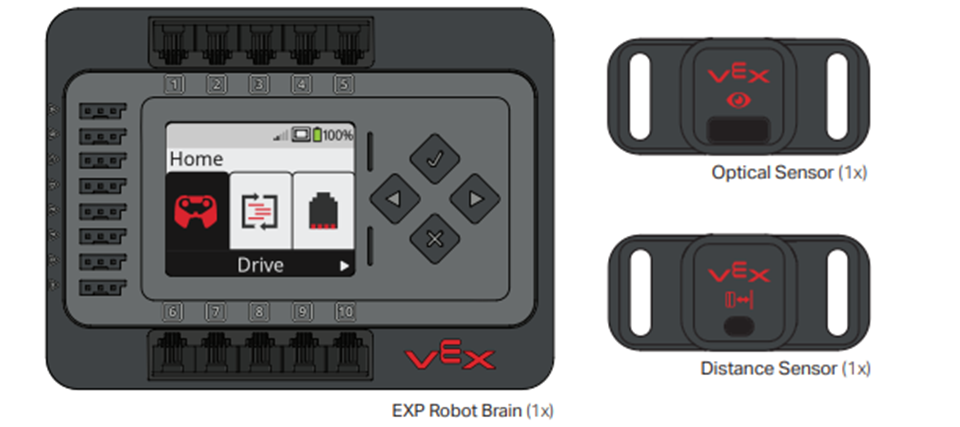
Le capteur optique est une combinaison du capteur de lumière ambiante, du capteur de couleur et du capteur de proximité. Le capteur optique est capable d'accomplir ces tâches lorsqu'il reçoit de l'énergie lumineuse et convertit l'énergie en signaux électriques. L'électronique interne du capteur (une machine d'état matérielle) convertit ces signaux en signaux de sortie à recevoir en entrée par le cerveau EXP.
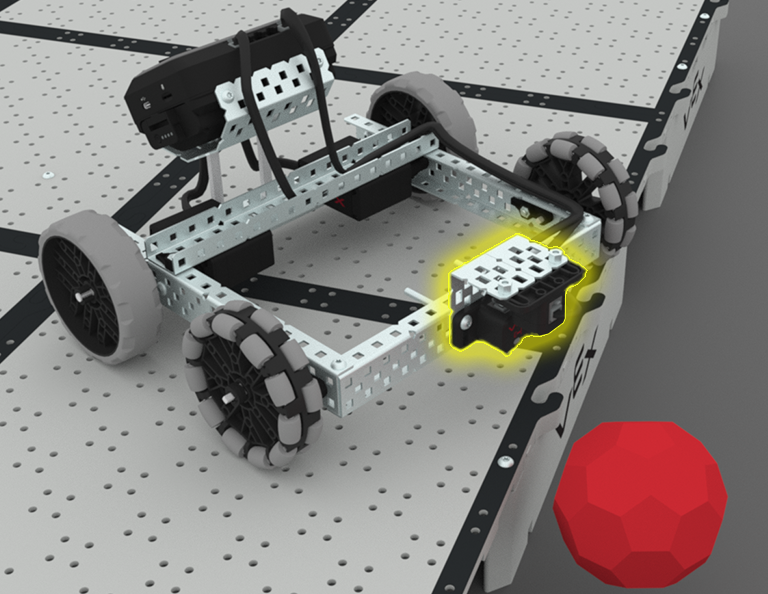
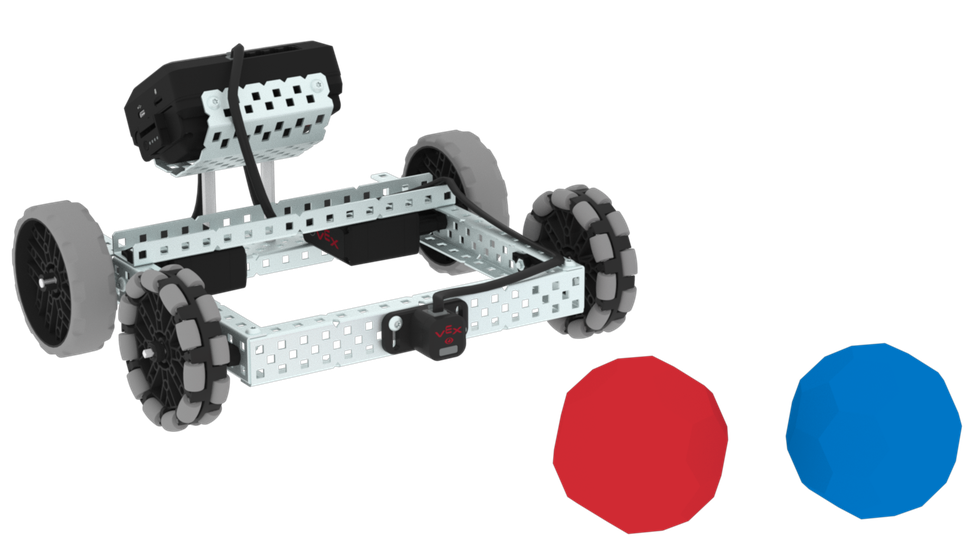
Encore une fois, le placement du capteur dépend entièrement du scénario d'utilisation. Le scénario le plus utilisé avec EXP implique que le capteur optique détermine la couleur d'un autre objet. Par exemple, le capteur optique peut être monté à l'avant de l'EXP BaseBot et utilisé pour distinguer la couleur des Buckyballs (comme le montre l'image à droite). Ce scénario nécessite que le capteur optique ait un chemin clair devant le capteur entre tout objet mesuré et le capteur. Assurez-vous qu'aucune structure sur le robot n'est en face de la petite fenêtre du capteur optique sur la face du capteur. En vous assurant que cela signifie que vous obtiendrez des lectures précises lorsqu'un objet apparaîtra dans sa vue.
Capteur de distance
Le capteur de distance a les capacités de mesurer la distance, de détecter des objets, de déterminer la taille relative de l'objet et de signaler la vitesse de l'objet. Le capteur de distance est capable d'accomplir ces tâches car il envoie une impulsion d'un laser de classe 1 et mesure le temps nécessaire pour que l'impulsion soit réfléchie.
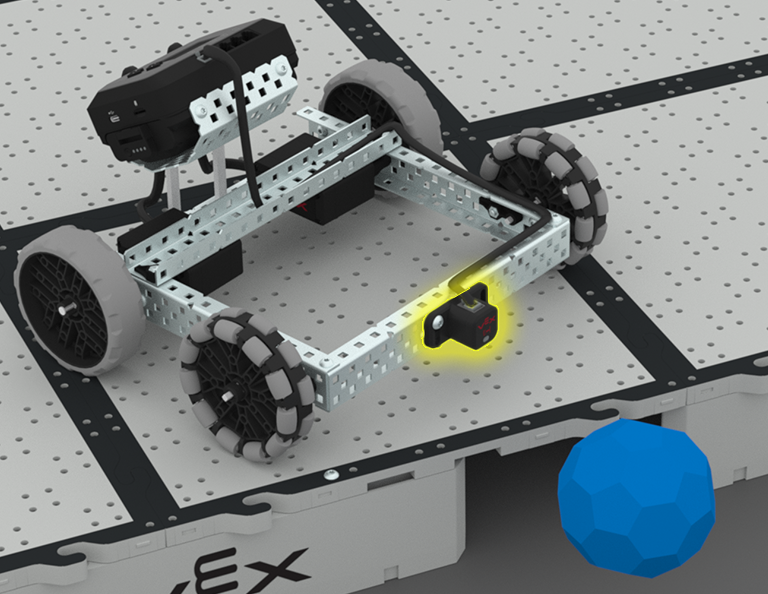
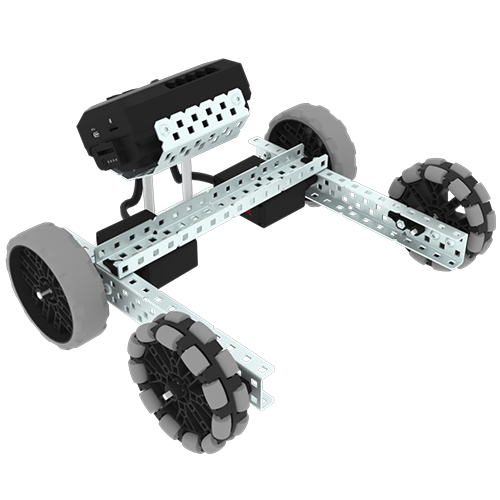
Le scénario le plus utilisé avec EXP implique que le capteur de distance détermine la distance à un autre objet. Par exemple, le capteur de distance peut être monté à l'avant de l'EXP BaseBot et utilisé pour distinguer la distance entre le capteur et les Buckyballs. Le BaseBot peut être codé pour se diriger vers les Buckyballs et les pousser hors d'un champ surélevé (comme le montre l'image ci-dessous). Ce scénario nécessite qu'il y ait un chemin clair devant le capteur entre tout objet mesuré et le capteur. Assurez-vous qu'aucune structure sur le robot n'est en face de la fenêtre du petit capteur sur la face du capteur. En vous assurant que cela signifie que vous obtiendrez des lectures précises lorsqu'un objet apparaîtra dans sa vue.
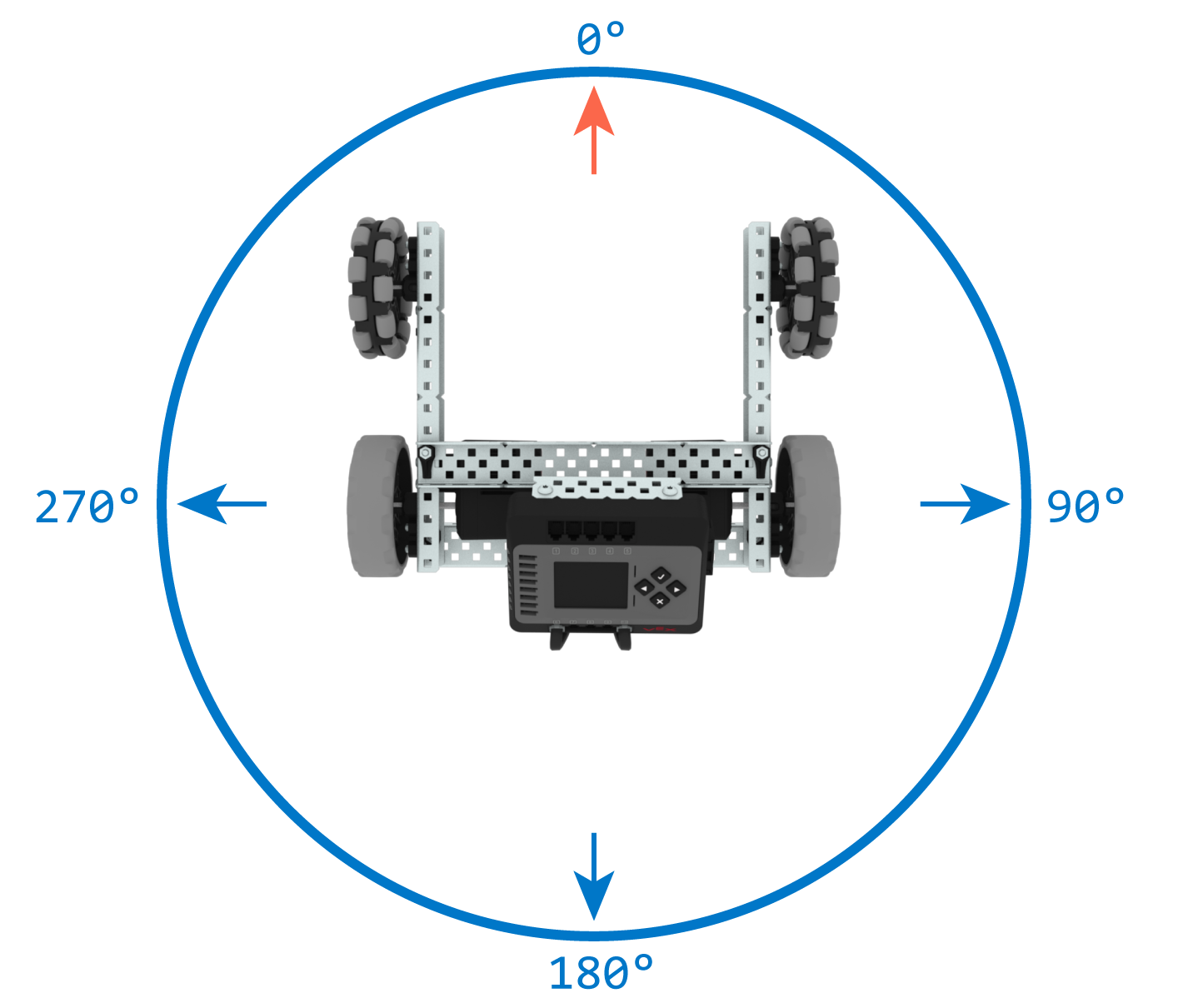
Données du capteur inertiel du cerveau VEX EXP
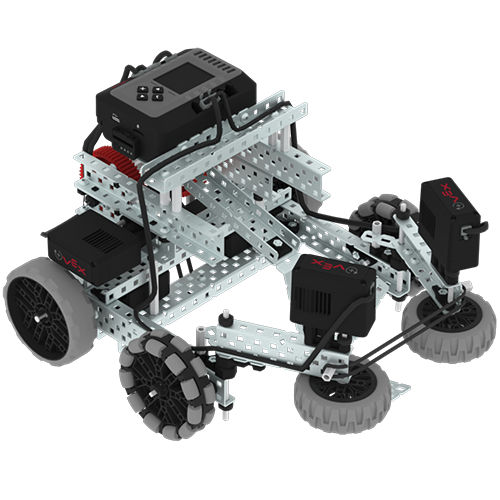
Le VEX EXP Brain est doté d'un capteur inertiel intégré. Le capteur inertiel rapporte des données sur le cap, la rotation, l'orientation et l'accélération dans le tableau de bord du capteur et dans VEXcode EXP. Il est important de savoir que lors du montage de votre cerveau, essayez de le monter de manière à ce que le cap, le tangage, le roulis et le lacet s'alignent sur le cap du robot pour plus de simplicité. Ceci est pris en compte avec le BaseBot, le Clawbot et le CatapultBot (image ci-dessous), mais doit être pris en compte avec des versions personnalisées. Si votre cerveau n'est pas aligné avec votre robot, les données que vous recevez peuvent être erronées.

Utilisation
C'est cool de penser à la façon dont ces capteurs donnent techniquement vie à ces constructions, car ils sont conçus selon nos sens réels. Pensez-y concrètement, dans quels scénarios utiliseriez-vous un certain sens ?
Interrupteur du pare-chocs
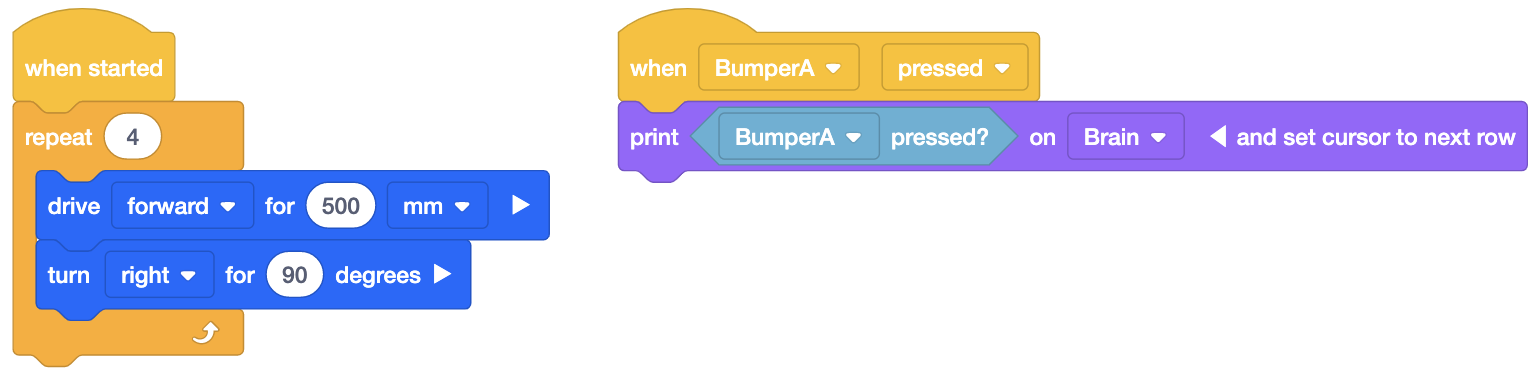
Après avoir ajouté le commutateur de pare-chocs en tant qu'appareil dans VEXcode EXP, il existe deux scénarios principaux dans lesquels il est utile. Ces scénarios impliquent lorsque le code détecte une pression et des événements de pare-chocs. La détection de pression permet à votre robot de détecter quand quelque chose appuie sur l'interrupteur de pare-chocs, tandis que les événements de pare-chocs vous permettent d'exécuter un code spécifique lors de la détection de quelque chose qui appuie sur l'interrupteur de pare-chocs. Le scénario le plus utilisé avec EXP implique que le pare-chocs détermine si votre robot est entré en contact avec un autre objet. Dans la première image ci-dessous, l'utilisateur a codé que si l'interrupteur de pare-chocs entre en contact avec quoi que ce soit, le robot cessera de rouler en avant. Connaissant l'utilisation de l'interrupteur de pare-chocs, vous pouvez coder votre robot pour qu'il fasse n'importe quoi après l'avoir enfoncé.
Par exemple, vous pouvez le coder pour sauvegarder, tourner, arrêter de conduire ou simplement mettre fin à l'ensemble du projet. Un autre scénario implique l'interrupteur de pare-chocs placé près du haut du robot et à l'écart des pièces structurelles à utiliser comme arrêt d'urgence par l'opérateur. Comme dans l'exemple précédent, nous pouvons analyser les données et les utiliser pour prendre une décision. L'exemple qu'ils utilisent dans l'image de droite est l'impression que l'interrupteur de pare-chocs a été appuyé sur le cerveau. À quoi pouvez-vous penser ? Pensez-y de cette façon, si vous écrasez votre voiture contre un mur, quelle est votre réaction ? Inverser ? Arrêter de conduire ?
Capteur optique
Le capteur optique est un outil polyvalent et a une gamme d'utilisations. Après avoir ajouté le capteur optique en tant que périphérique dans VEXcode EXP, vous pouvez coder et utiliser le capteur optique pour :
- Allumez ou éteignez les voyants blancs du capteur.
- Réglez le pourcentage de puissance des voyants LED blancs.
- Détectez un objet.
- Détectez une couleur.
- Mesurez le pourcentage de luminosité de la lumière ambiante.
- Mesurez la teinte d'une couleur en degrés.
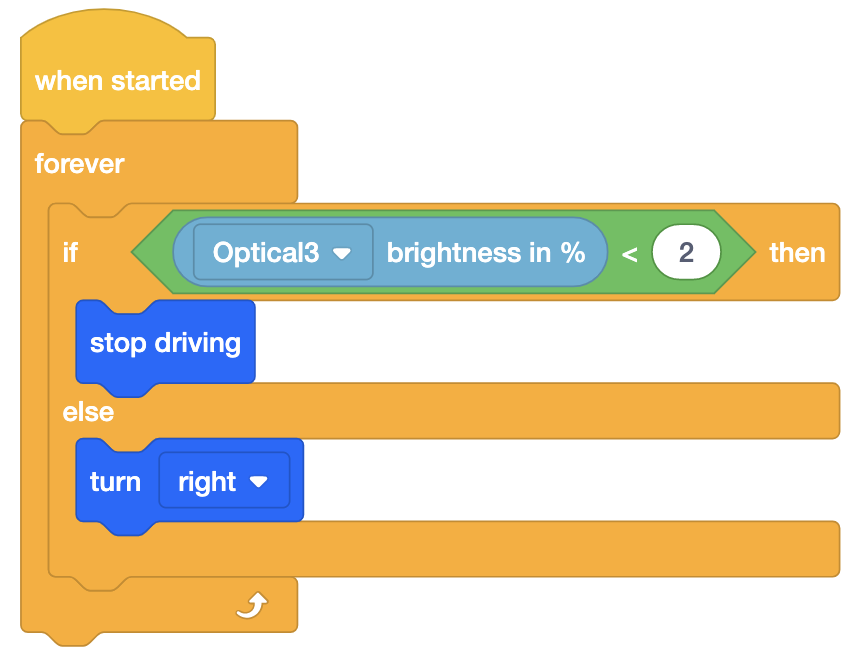
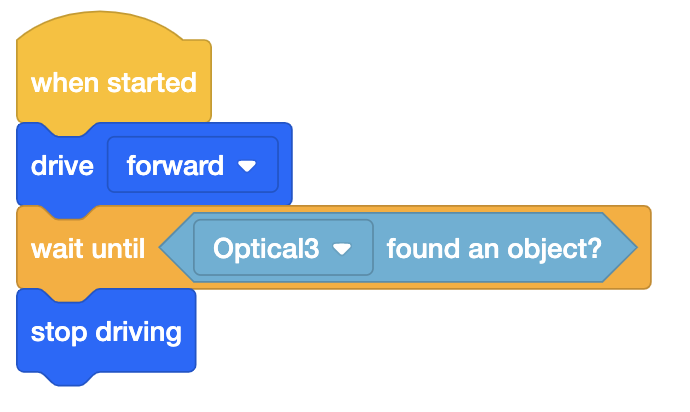
Le scénario le plus utilisé avec EXP implique que le capteur optique détermine la couleur d'un autre objet. Ensuite, l'analyse des données dépend entièrement de ce pour quoi vous utilisez le capteur. Vous voulez que le robot emmêle des Buckyballs d'une seule couleur ? Éviter une certaine couleur ? Arrêter de conduire une fois qu'il trouve une couleur particulière ? Le capteur optique est un excellent outil car vous pouvez l'utiliser de n'importe quelle manière que vous pouvez penser liée à la détection de la teinte ou de la lumière ambiante. D'autres scénarios incluent le robot arrête de conduire lorsqu'un objet est détecté, le robot arrête de conduire lorsque la luminosité devient supérieure à une certaine valeur, ou partout où une détection de couleur et de luminosité est nécessaire pour le robot.
Capteur de distance
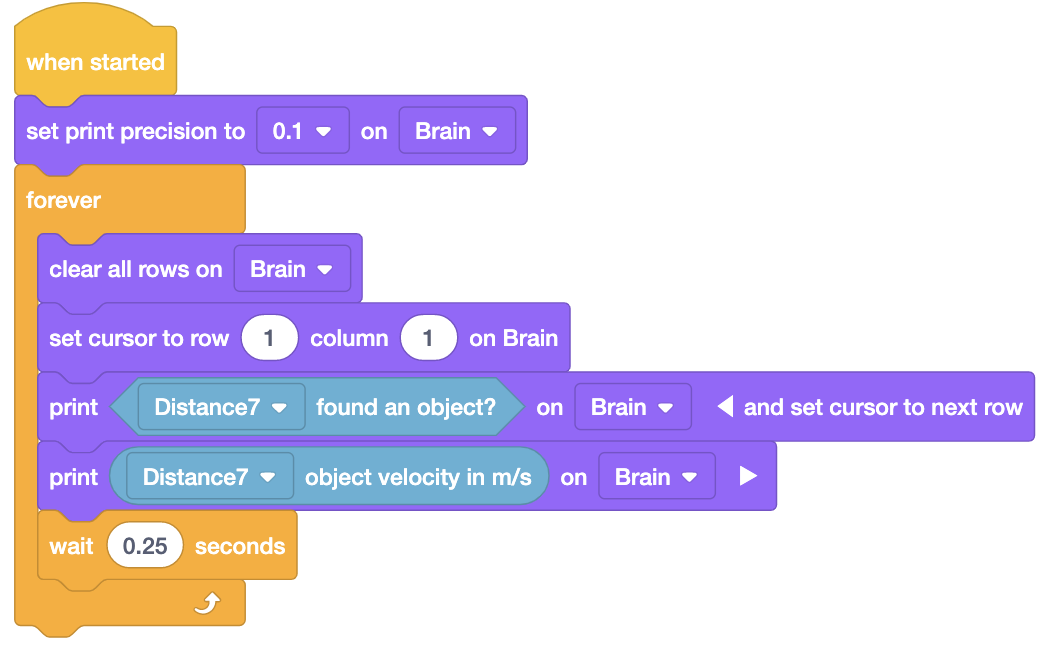
Le capteur de distance peut produire plusieurs mesures qui peuvent être utilisées pour modifier le comportement du robot une fois qu'il est ajouté à VEXcode. Le cerveau EXP, de concert avec un projet utilisateur, peut être utilisé pour convertir les lectures du capteur de distance en :
- Distance à un objet mesurée en centimètres, millimètres ou pouces.
- Vitesse de l'objet en mètres par seconde.
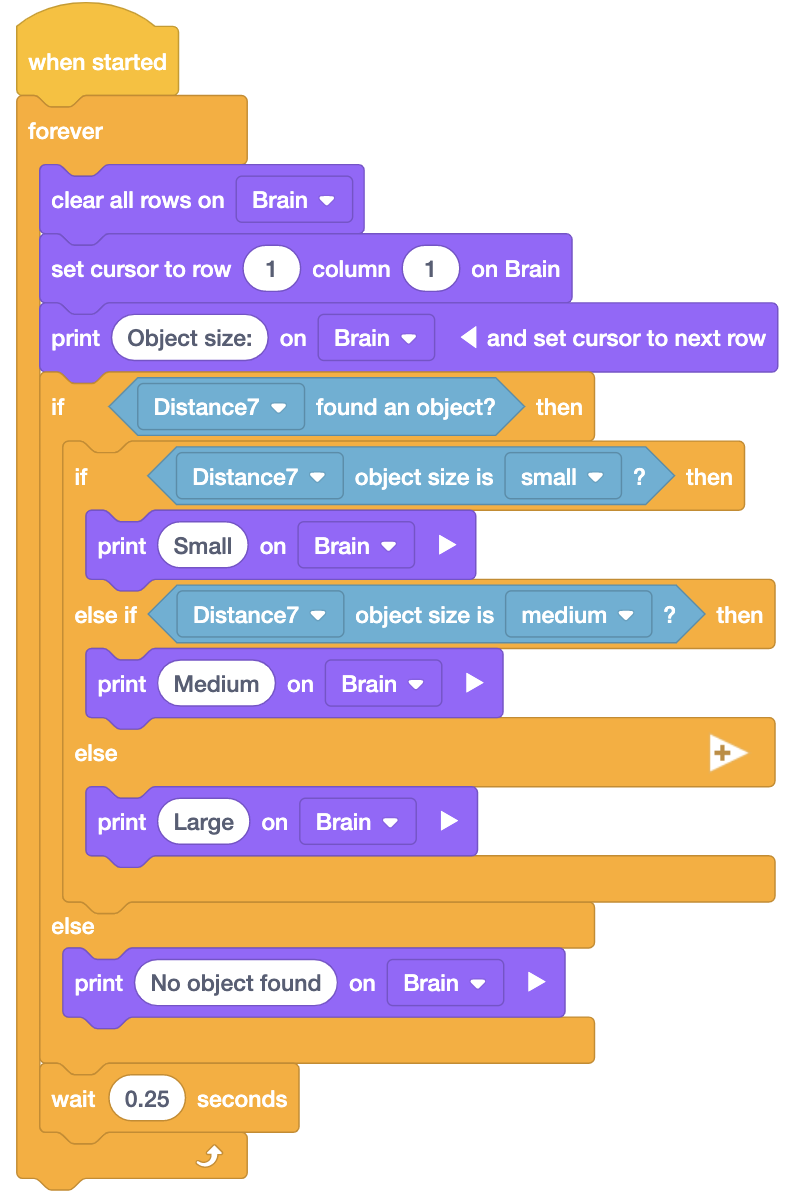
- La taille de l'objet est petite, moyenne ou grande.
- Objet trouvé.
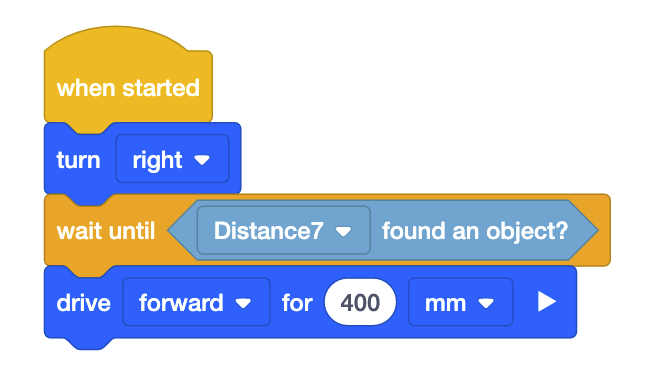
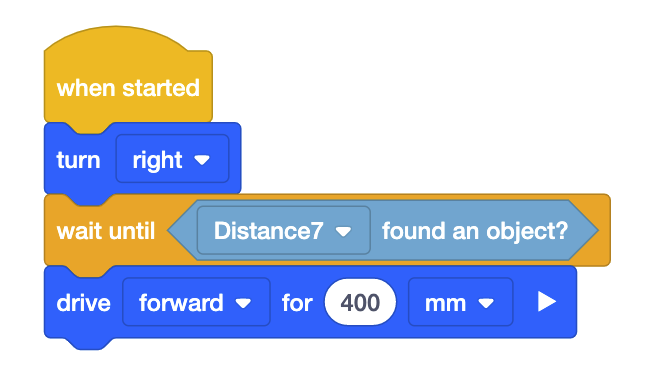
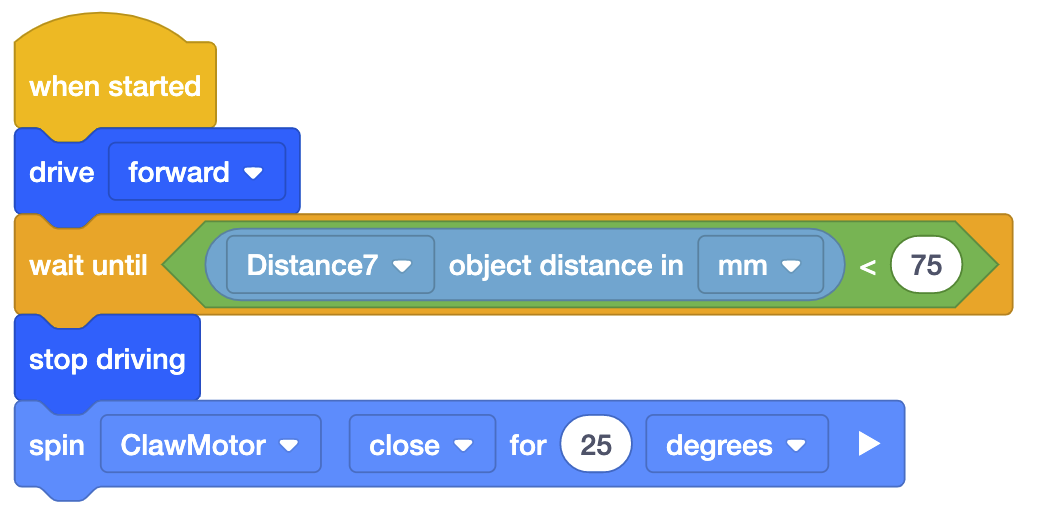
Le scénario le plus utilisé avec EXP implique que le capteur de distance détermine la distance à un autre objet. Comme les exemples répertoriés avec les autres capteurs, l'utilisation dépend de la situation et de ce que vous voulez. Dans la première image, le code appelle le robot à tourner jusqu'à ce qu'il détecte un objet, puis à avancer de 400 mm une fois qu'il l'a fait. Dans le deuxième exemple, le Clawbot ferme sa griffe une fois qu'un objet est plus proche que 75 mm. D'autres scénarios incluent le robot détectant un objet et évitant ou s'approchant de l'objet, déterminant la distance pour l'attraper, signalant la vitesse de l'objet sur le cerveau, ainsi que la taille relative de l'objet, à la fois pour l'opérateur du robot. L'utilisation de l'une des fonctions du capteur de distance vous permet de réagir à ce qui se passe. La question qui suit est de savoir comment voulez-vous et avez-vous besoin que votre robot réagisse ?
Données du capteur inertiel du cerveau VEX EXP
L'utilisation des données du capteur inertiel est incorporée dans votre code. Comprenez que vous pouvez réduire la vitesse de votre robot, changer de cap, de tangage, de lacet ou de roulis grâce au capteur inertiel. Lorsque vous dites au robot de tourner à droite, soit par VEXcode, soit par le contrôleur, il demandera au cap de changer en conséquence. L'utilisation de ce capteur vous permet de déplacer votre robot dans l'espace.
Application
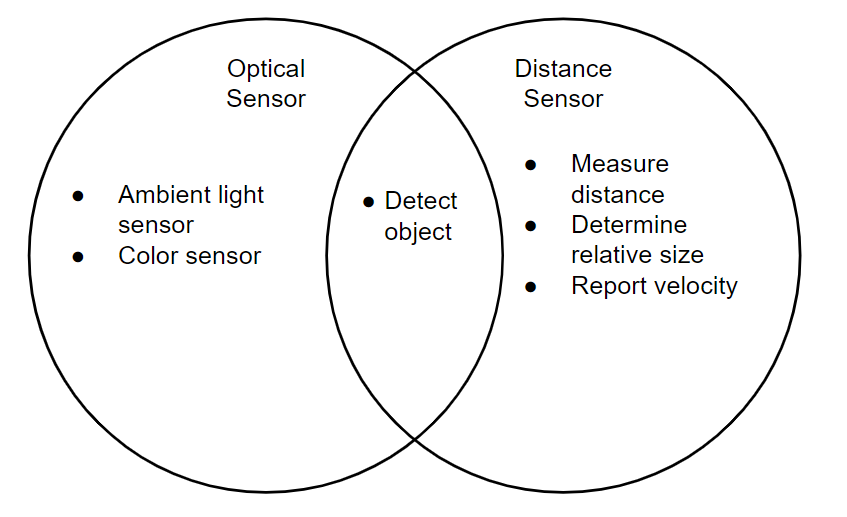
En utilisant les informations fournies ci-dessus, si une situation se présente dans laquelle un capteur est nécessaire, assurez-vous de le placer à l'emplacement le plus optimal sur votre construction selon son utilisation. Vous n'êtes toujours pas sûr ? Mettez-vous à la place du robot. Quel est l'emplacement le plus optimal pour vos yeux ? Qu'en est-il du toucher ? En ce qui concerne le capteur que vous devez utiliser, il n'y a pas de bonne réponse. Vous devez le baser sur ce que vous devez faire, et quel capteur peut accomplir cette tâche. Voir le diagramme de Venn ci-dessous ; si vous cherchez à utiliser un capteur pour détecter un objet, vous pouvez utiliser le capteur de distance ou le capteur optique. Comprenez que chaque capteur a ses propres capacités, puis choisissez celui qui répondra à vos besoins.
N'oubliez pas que EXP est également l'équivalent en classe de V5. Les capteurs V5 sont rétrocompatibles avec l'EXP Brain ainsi qu'avec le code, et ils sont même implémentés dans le code. Vous voulez en savoir plus avec votre kit EXP ? Essayez d'utiliser les capteurs V5.